Paso 16: Conectores y cableado







Alimentación está conectada a un interruptor de encendido y luego a la Junta de energía de nuestro sistema. A partir de ahí, la placa de potencia entrega el voltaje correcto a cada circuito. La placa de potencia se conecta a las cuatro de las otras tarjetas con conectores DF5. Las tablas de tiempo de vuelo, el Control y localización de todos consiguen la alimentación regulada desde la placa de potencia y la Junta IR también obtiene energía no regulada para los emisores de IR.
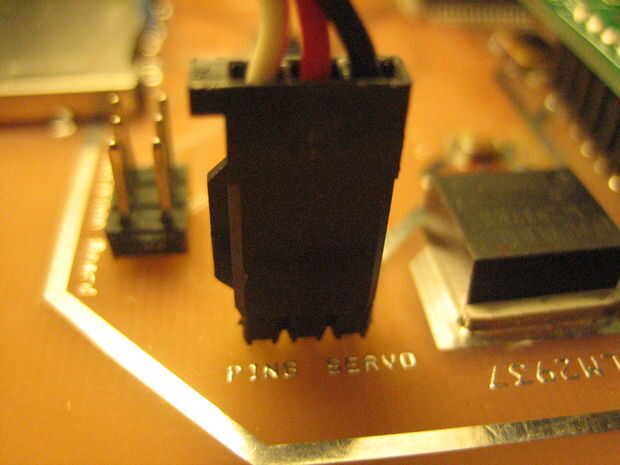
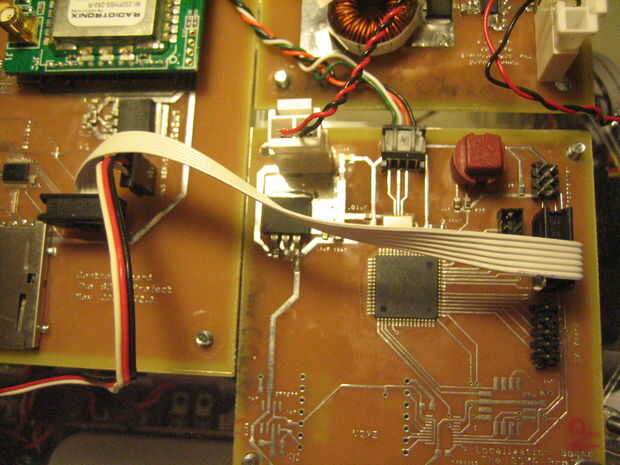
El tablero de Control se conecta a la placa de localización, el sensor ping, el servo y la antena. Utiliza un cable plano de 6 hilos para la conexión de la SPI a la Junta Directiva de localización. Se utilizan un CST-100 de 7 polos para el sensor ping. Para la antena se utilizó un cable de extensión SMA para ejecutar la antena a la parte superior del robot. Para el servo se utilizó el conector que se proporcionó en el servo estándar de paralaje.
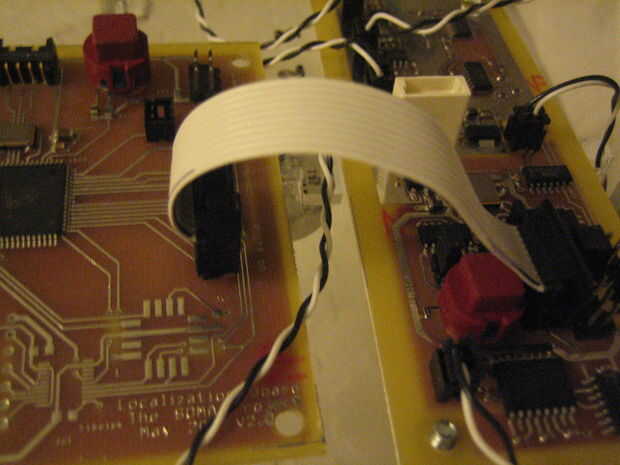
La Junta de localización se conecta al crear con un conector que tenemos conectados. En el lado de localización utiliza un conector de 4 pines DF3 y en el iRobot lado un conector Mini Din. El tablero de localización también se conecta a la Junta ultrasónica utilizando un conector de cable de cinta de 10 clavijas para todas las conexiones de tiempo de vuelo y localización. Esto incluye la conexión de SPI y la señal de 24kHz. También conecta a la Junta de IR una señal 26,7 kHz utilizando un conector de 2 pines DF3.
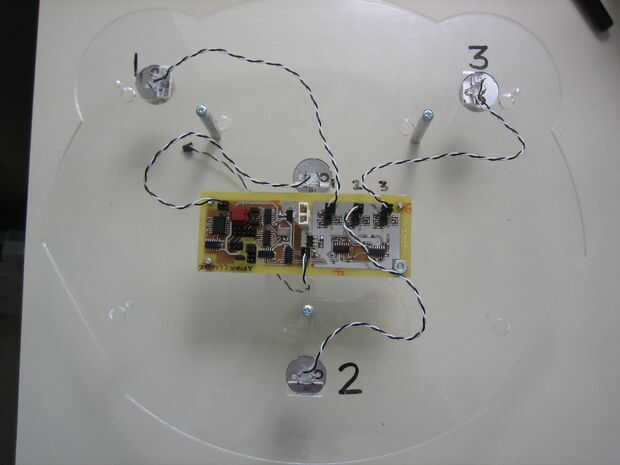
La placa ultrasónica se conecta al tablero de IR y todos los transductores utilizando los conectores de 2 pines DF3.
")












