Paso 18: Programación de las tablas - programación

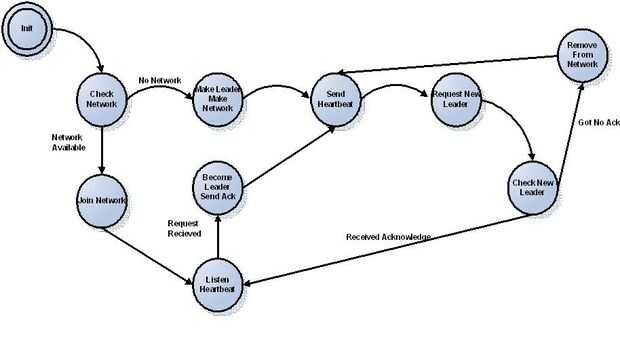
El tablero de Control utiliza el proyecto de command.aps que tiene tres características principales: comunicación, control de movimiento y paso de token. Empieza por primero crear o unirse a una red y luego empieza la máquina principal de estado para control de movimiento y paso de token. Si el robot se declara como el líder entonces tendrá turno de explorar. Esto significa que coche y evita los obstáculos y parará y hacer un barrido de 180 grados de la zona y enviar su ubicación así como la ubicación de obstáculos alrededor de él a un PC para crear un mapa. Luego pasó liderazgo a otro robot en el enjambre y el proceso comienza de nuevo.
La Junta de localización utiliza el proyecto de localize.aps que contiene las funciones que el iRobot y la placa ultrasónica. Recibe odometría lecturas de las lecturas de iRobot y localización de la placa ultrasónica. También envía los comandos para el iRobot que impulsan los motores. Además, la Junta de localización genera las señales 24 y 36,7 kHz que impulsan las transmisiones IR y ToF.
Cada uno de los microcontollers en el tablero de ToF utiliza el proyecto de tof.aps y es funcionalmente idéntica. El propósito de la Junta de ToF es sencillo: por la diferencia de tiempo de llegada del sonido ultrasonido y luz infrarrojo simultáneamente emitido de la sincronización, se puede saber cuán lejos está la fuente de emisión. Registrando el tiempo de vuelo en tres puntos separados en el robot, puede triangular la posición de la fuente. Cada microcontrolador utiliza un pin dedicado entrada captura con precisión el tiempo de cuánto tiempo el infrarrojo es visible (como una verificación que es la señal deseada) y calcula el tiempo de vuelo del sonido. Este dato está listo para ser transferido a la Junta de localización a petición.
Además de todas las funciones principales para cada microcontrolador hay varios programas de prueba que se pueden ejecutar en las juntas. Nuestro programa de prueba principal de los robots fue un programa WASD que básicamente los robots con los transceptores que estaban en los robots con control remoto.
")












