Paso 2: Teoría de operación

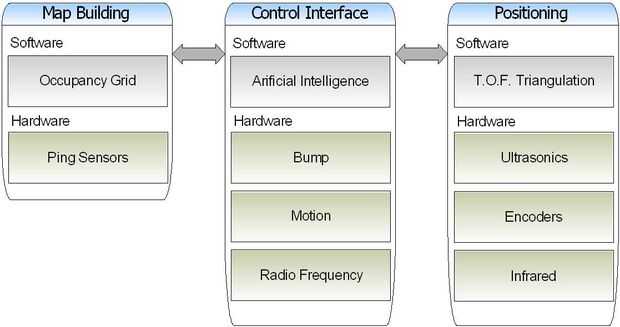
Cada robot puede ser visto como un sistema compuesto por tres bloques de tres: mapa construcción, posicionamiento y la interfaz de Control.
Mapa edificio
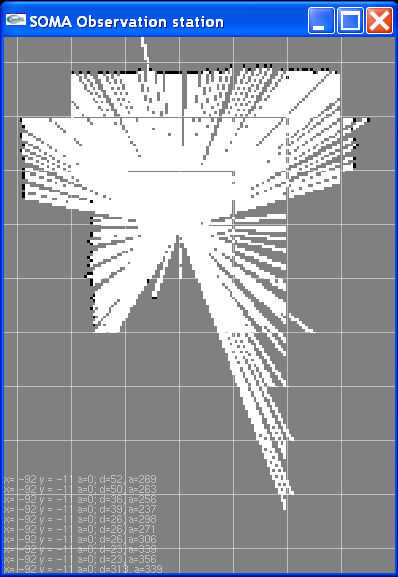
Cada robot recoge datos del obstáculo mediante un sensor de ultrasonido ping montado en un motor cinemático. El motor permite que el sensor ping recopilar datos de obstáculo para 180 grados delante del robot. Una vez realizada una lectura, los datos se almacenan en una red de ocupación: una estructura de datos que muestra la probabilidad de que un obstáculo en el espacio. Cada celda de la rejilla (o píxeles, en nuestra aplicación) muestra la probabilidad de un obstáculo en el espacio. Como robots cubren el mismo espacio, si están de acuerdo en un obstáculo en la misma ubicación que el son se vuelve más oscuro, si están de acuerdo que el espacio es claro, resulta más ligero.
El mapa crece dinámicamente a medida que más espacio se explora. La estructura de datos está diseñada para ser paginado en y fuera de una tarjeta SD. Cada página contiene enlaces a páginas de cercanas y se añaden nuevas páginas como espacio es necesario. La zona se almacena en una SRAM externa y páginas no utilizadas recientemente se escriben en una tarjeta SD en cada robot.
Posicionamiento
El sistema realiza un seguimiento de posición absoluta y relativa de cada uno de los robots en el enjambre. Posicionamiento absoluto utiliza codificadores de iRobot Create y tiene espacio de mesa listo para colocar una brújula y giroscopio para mayor precisión. Posición relativa se determina midiendo el tiempo de vuelo (ToF) de ultrasonidos emitidas por cada robot. Al grabar el ToF a tres puntos diferentes en cada robot recibe el sonido, cada robot puede triangular la posición del robot emiten luz y sonido. El robot anuncia su posición al mismo tiempo emite luz infrarroja y ultrasonido; el infrarrojo es recibido esencialmente instantáneamente por cada otro robot y los ultrasonidos viajan mucho más lento, por lo que la distancia y la dirección de la fuente pueden ser determinados fácilmente.
Interfaz de control
La interfaz de control supervisa el funcionamiento de todos los sistemas en cada robot y es la principal inteligencia artificial del robot. La interfaz de control es también responsable del mantenimiento de la red del enjambre y todas las comunicaciones de RF. La inteligencia artificial es responsable de crear el enjambre como robots y mantener la red como se construye un mapa. El resto de la IA se dedica a la evitación del obstáculo y puede ser adaptado para optimizar la cobertura de un espacio.
Información completa sobre el diseño y construcción de todo el proyecto puede encontrarse en nuestro Informe Final.
")












