Paso 9: Montaje y configuración del controlador de vuelo


Básicamente, el controlador de vuelo es el cerebro de nuestro quadcopter. En este instructable he decidido utilizar un controlador de vuelo pre-hechos que es bastante simple, robusto y tiene buenas críticas en línea. Creo es un buen controlador para empezar y luego cuando estamos listos, podemos programar nuestro propio controlador de vuelo utilizando un arduino, por ejemplo.
Configurar el controlador de vuelo
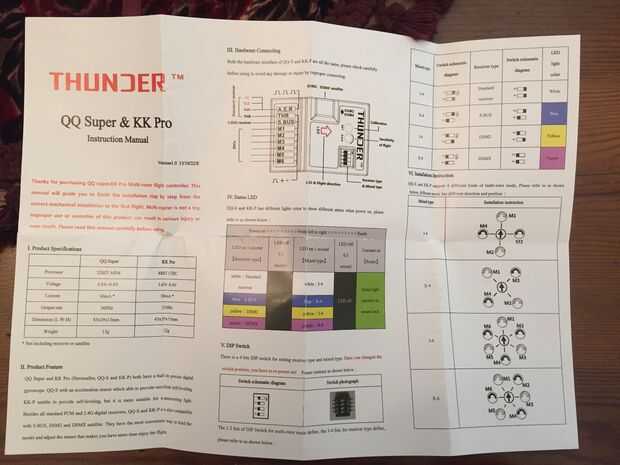
Como se puede ver en el manual primero debemos configurar el controlador de vuelo. Derecha el logo QQ podemos ver 4 interruptores que tienen sólo 2 modos. Tenemos que configurar por el manual.
Este instructivo describe un quadcopter X-4 con un receptor estándar y por lo tanto, la configuración es como a continuación:
- Derecho
- Izquierda
- Derecho
- Derecho
Al conectar el controlador al poder debería ver la flecha se enciende en blanco por 1 segundo y luego las luces en azul para otro segundo. Al final verá luces en verde que significa que todo está bien.
Montaje del controlador de vuelo
El controlador de vuelo tiene un mecanismo de equilibrio automático el quadcopter con un sistema de giroscopios. A fin de que funcione correctamente, necesitamos colocar en el centro de la X, en el centro, y asegúrese de que la flecha se convierte en la dirección del vuelo que queremos. Te recomiendo el vuelo en la dirección de la cámara (en caso de que convierten en FPV).
Conexión de los CES
Ahora es el momento para conectar el cable de control de la CES al controlador de vuelo. Siga las instrucciones y asegúrese de que conecta la salida derecha a su puerto correspondiente. Nuestro quadcopter es que un X-4 significa que utilizamos M1 a M4 puertos del controlador de vuelo.














