Paso 2: Modificar el Servo


Un servo de control de radio estándar está diseñado para ser conducido por un tren de pulsos en posición exactamente el eje de salida en 160 grados más o menos de viaje según el ancho de pulso de entrada. Esto es no lo que quiero para este proyecto, pero un servo es un motor y una caja de engranajes en una caja pequeña, que es!
Hay dos formas de modificar un servo para rotación continua. Uno consiste en mantener cierto control de velocidad y dirección del motor 'engañando' a la electrónica de control. Este todavía necesita el pulso tren de entrada para su control. No quiero esto.
La otra forma es hackear a la electrónica de control y conecte los cables de entrada directamente al motor que significa que se necesita controlar la dirección y velocidad del motor directamente. Esto es lo que he hecho aquí.
Hice este hace tiempo sin sacar fotos así que sólo te daré este enlace a Instructable de Guibot. Servos varían, pero el principio es el mismo:-parada potenciómetro limitando movimiento: cortar la pestaña de tope en el engranaje: Conecte los conductores del motor para suministrar cables.
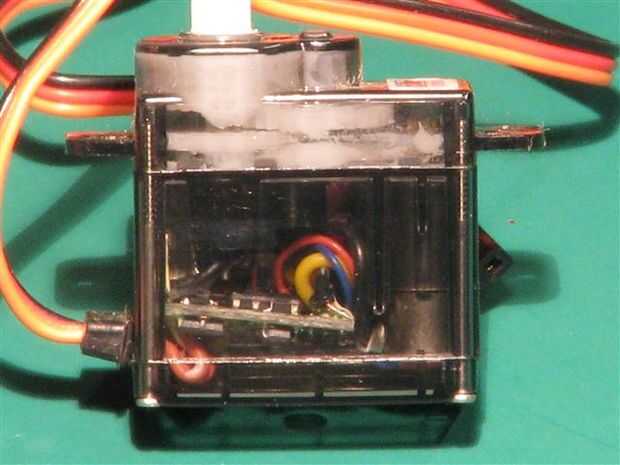
Colocar los engranajes en línea ya que desmonta la caja de cambios como son sorprendentemente difíciles de poner si pierdes la secuencia. Si no tienes grasa silicona, preservar tanto como sea posible hacer esto y untar en las superficies de contacto cuando usted vuelva a montar el servo.













