Paso 1: Reunir las partes


Primero se necesita un ordenador, conectado a internet. Se ayuda a si se trata de una computadora que usted utiliza (o es solo en) bastante mucho todo el tiempo, usar mi equipo de trabajo, pero si tienes un centro de prensa PC o servidor principal, que sería lo ideal. En este PC debe cargar el entorno de "Transformación", que puede descargar aquí.
Descargar procesamiento de http://www.processing.org
A continuación, necesitará descargar el programa que he escrito para leer que feeds del USGS. Usted puede encontrar en la parte inferior de la página aquí. Este es cargado en el IDE de procesar y ejecutar. Se necesita hacerle cambiar él, cambiar la referencia a "COM6" cualquier puerto COM utiliza el ordenador para hablar con un Arduino.
Hablando de Arduino, el siguiente requisito es que un Arduino de algún tipo. En este proyecto utilicé una Boarduino de Adafruit, debido a la roca. También son muy fácil de usar con breadboards.
Más información sobre Arduino
Aprenda más acerca de Boarduino
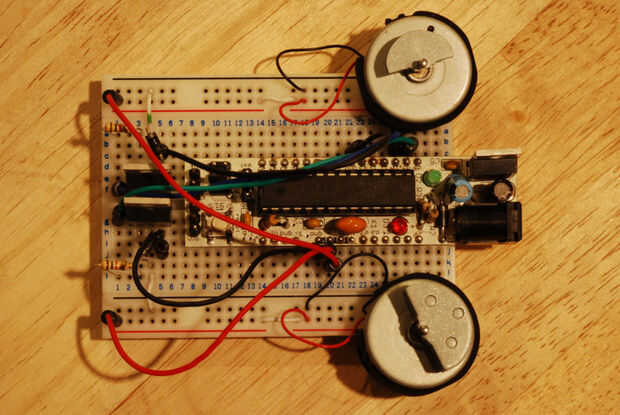
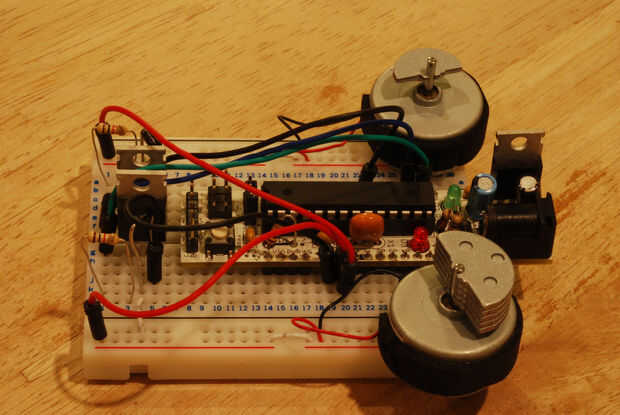
Hablando de breadboards, le aconsejo que utilice uno para construir este proyecto al principio, a menos que seas súper cool y quiere sumergirse directamente en la fabricación de PCB, o algún tipo de nido de ratas stylee. He utilizado una placa completa este proyecto como vereis en las fotos.
A continuación usted tendrá algunos componentes. Aparte el Arduino, tal vez lo más importante aquí es los motores de vibración. He usado motores de vibración de un playstation dual - descarga controlador que probablemente están clasificados acerca de 5v, aunque estoy adivinando aquí. Puede utilizar cualquier cosa que usted puede conseguir sus manos en, pero deben ser capaces de lanzar sí mismo todo un poco, así que probablemente necesite algo más grande que un motor pager. Más controladores de juego, incluyendo las crisis dual de Playstation tienen un motor de baja frecuencia con un gran peso en tanto un motor de alta frecuencia con un pequeño peso. Esto es útil para nosotros ya que crea una vibración agradable sensación orgánica cuando ambos se utilizan juntos.
Alimentar motores de pines del arduino parece que debería funcionar, pero en realidad es muy mala. Puede freír el pin muy fácilmente, por lo que no lo hacen a los niños. Si tienes algún tipo de puente H ahí entonces usted puede hacer eso, o sólo usar algunas configuración de transistor basado para tomar la carga actual de la clavija y evitar la corriente que fluye hacia atrás. Aprendí a hacerlo desde el excelente recurso ITP en controlar grandes cargas corriente con transistores.
Aprender más sobre el uso de transistores de control de motores en el ITP
He utilizado dos motores por lo que yo he construido dos circuitos independientes para controlarlos mediante PWM de arduino pernos. Si sólo tiene un motor, o más deberá duplicar los componentes para cada motor que desea manejar.
Para cada circuito del motor he utilizado:
1 x TIP120 transistor (NPN) (ficha técnica)
1 x resistencia de 1 k Ohm
1 x diodo de potencia
Algunos cables de interconexión
Se puede ver el diagrama del circuito para esto, y una más detallada lista de piezas en la página ITP que yo arriba, no puedo decirte qué un recurso fresco es ITP.
En mi código, estoy usando los pines 9 y 10 en el arduino, pero se puede cambiar el código para utilizar cualquier pines (PWM) te gusta.













