Paso 3: El receptor (cliente):
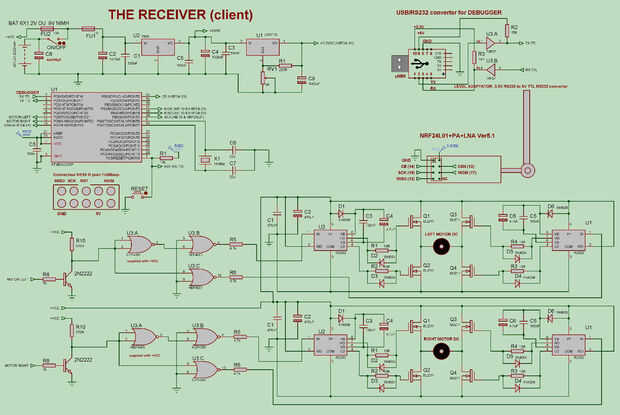
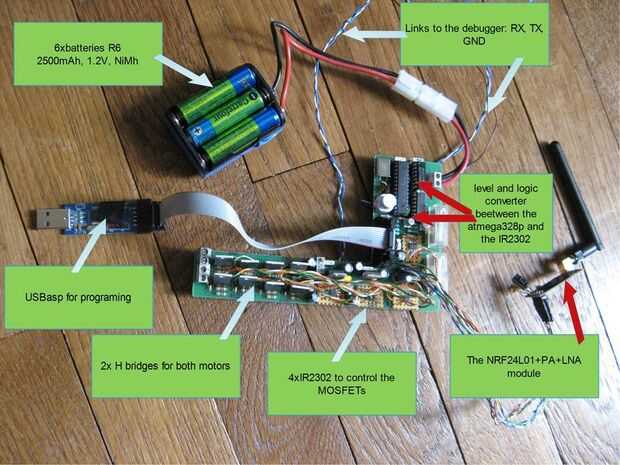
El receptor se compone de:
-un atmega328p, programado a través USBasp y depurado con mi depurador externo especial
-un NRF24L01 + PA + LNA a bo junto con el emisor
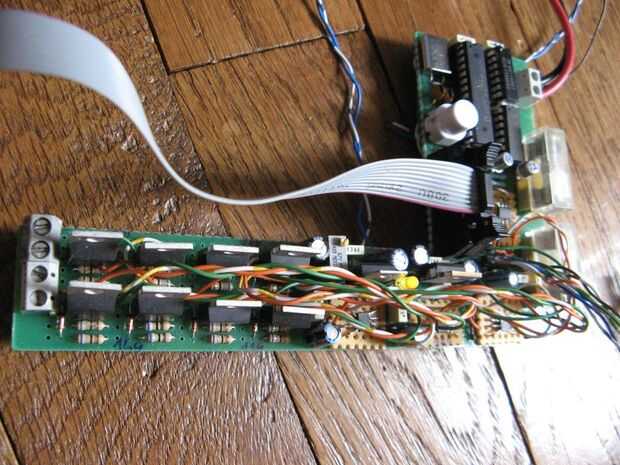
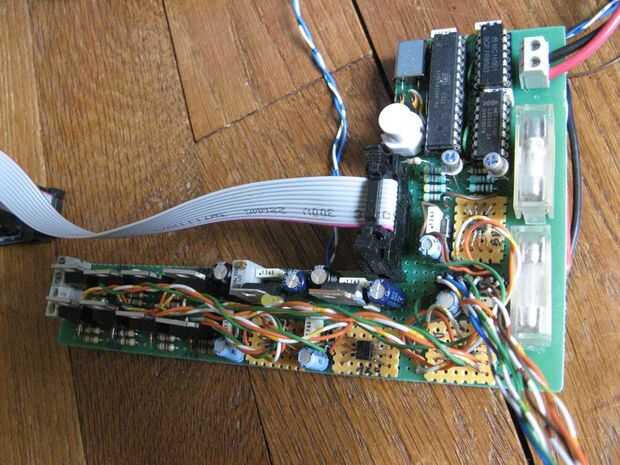
-puentes de H dos de canal MOSFET N
-4 circuitos para controlar el MOSFET (muerto veces, manos a la obra): IR2302, debido a su baja tensión PWM entrada entre 5V y 20V (alrededor de 10V para el receptor)
-2 fusibles: circuito, circuito de control
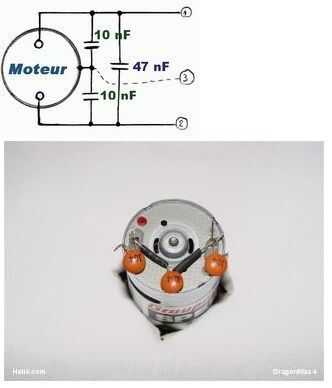
-3 o 4 grandes condensadores de 4700µF cada que ENLAZAS en el pasador de + y - de las baterías. Si no, no funciona correctamente debido al gran aumento de la corriente en los motores de la C.C. mientras que comienzan. También necesitará conectar pequeños condensadores de 10nF y 47nF en los motores para evitar parásitos HF (véase las fotos arriba).
Tras varias pruebas, el valor de los condensadores (tan alto) para decouplings depende de tus poderes de motores y la calidad de las baterías, pero es necesario.
En el programa que utilicé:
-la biblioteca Mirf para enviar y recibir datos
-PWM en el pin D5 y D6 con la especial registro TCCR0B que tienen una alta frecuencia de 62500 hertzios. Sus efectos lo timer 0 y alguna función pueden no funcionar correctamente (servo, retardo y millis un poco más rápido ahora)
-un método para recibir mensajes y analizar el marco: bytes en una matriz de char -> matriz de la cadena a leer el mensaje -> string a entero para leer el punto de ajuste de la velocidad
-un truco para rechazar los códigos mal y detener el barco cuando el emisor está apagado o bajo.
-algunos ajustes para ajustar el estado de parada a 110 (0VCC promedio en los motores), máxima velocidad FW a 227 (+ promedio VCC en los motores), máxima velocidad RV 3 (-promedio VCC en los motores), cosas que probablemente tendrás que hacer con su propio motor de corriente continua.



")




")

")
")
")
