Paso 2: Configurar el módulo Wi-Fi
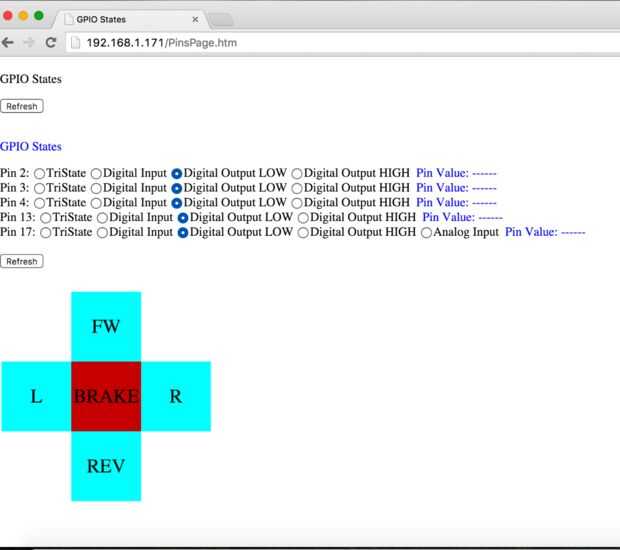
Con el fin de permitir la comunicación entre el robot y el ordenador, el chip WIFI WF32 debe ser configurado y programado. Utilice el código de ejemplo en para familiarizarse con el WF32 y asegúrese de que usted puede establecer una conexión entre el módulo y su equipo. Para este proyecto, el archivo HTMLgetPins.cpp debe modificarse para que la página de conseguir Pins sólo muestra alfileres pertinentes y un controlador con botones adelante/atrás/izquierda/derecha/freno. Para ello, alterar la máquina y añadiendo algunos HTML dinámico / JS / CSS. Una vez que se carga este archivo, usted puede utilizar las teclas de flecha del teclado y barra espaciadora (freno) para controlar los robots, o físicamente puede hacer clic en los botones direccionales.













