Paso 2: Montaje del marco

Nota - Este robot puede ser montado en cualquier forma o configuración así que por favor. El siguiente paso será describir cómo hemos construido. No dude en imitar nuestro diseño, pero también recordar que este robot se puede construir cualquier forma que desee; es el sistema de rastreo ultrasónico que cuenta.
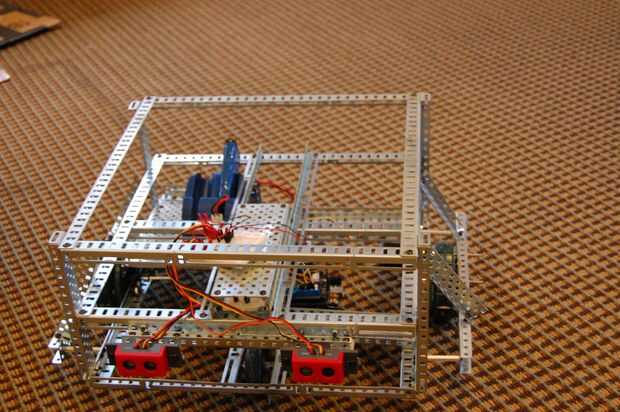
1. para empezar, iniciar mediante ángulo ranurado de 15" cuatro pedazos y formando un cuadrado, donde las partes se enfrentan en y. Mantenga las ranuras de largo perpendicular a la tierra y del corto paralelo al suelo. Hacer esto tres veces.
2. Agregue las barras de 8" para las esquinas exteriores del primer fotograma. Luego añadir el segundo cuadro en el octavo agujero (doble) de la barra. Coloque la tercera barra en el último agujero (solo) en la barra de 8" y asegúrese de que la parte superior es plana.
3. Coloque dos ángulos ranurado de 15" en el hoyo 13 en de cada lado en la parte inferior de la primera plaza de marco. Ranuras de largo deben ser paralelas al suelo y las ranuras cortas deben ser perpendiculares.
4. Fije dos ángulos ranurado de 15" con el agujero 12 de cada lado en la parte superior de la segunda plaza de marco. Ranuras de largo deben ser paralelas al suelo y corta ranuras deben ser perpendiculares.
5. Fije un ángulo ranurado de 15" así que cruza las dos piezas anteriores (ranura de 15/16) para la ayuda. Debe fijarse en la parte inferior de la segunda y los dos ángulos ranurados.
6. Fije dos ángulos en el interior de los dos ángulos ranurados que están en el segundo cuadro. Éstas deberán colocarse hacia la parte delantera, de sobre la primera ranura en la ranura de 15.
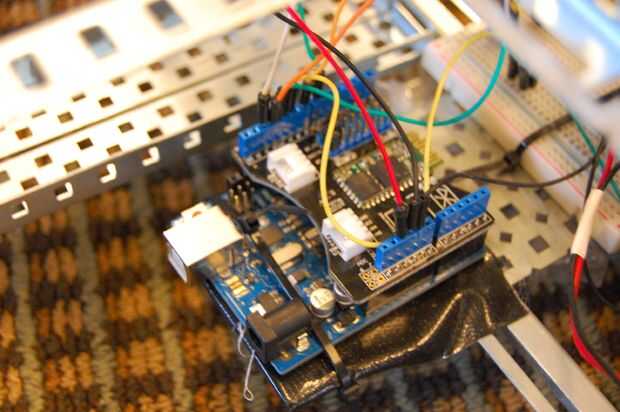
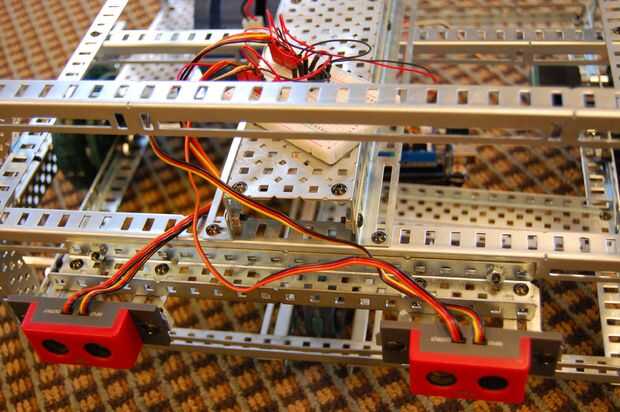
7. Fije una placa de metal a los dos ángulos anteriores, así como los dos ángulos ranurados en el primer fotograma hacia el centro. Estas placas llevará el Arduino y breadboads. Asegúrese de colocar una tira de cinta de conducto o gorila en la placa que llevará el Arduino.
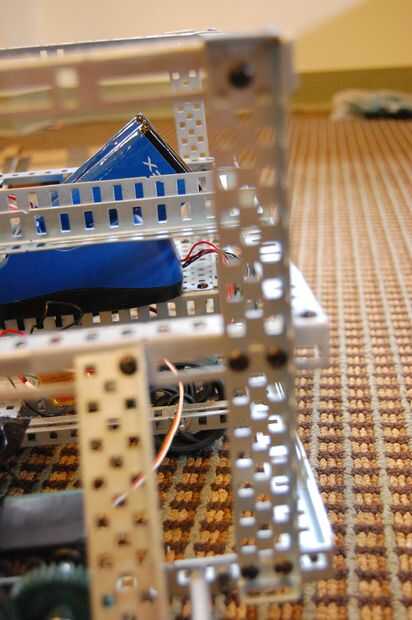
8. Fije dos carriles en el primer cuadro a los dos ángulos ranurados (que forman una base para la batería de 9v). Coloque el más cercano a la placa en el orificio de 12/13 y el más alejado de la placa en el agujero de 9/10.
9. un árbol de la alimentación a través de la ranura en ángulo ranurado en el primer fotograma de la secuencia: eje del cuello en el exterior, entonces ángulo ranurado, luego otra de eje cuello, rueda de omni, collar del eje, ángulo ranurado, luego collar eje final. Hacer esto dos veces en la parte delantera y trasera del robot. Asegúrese de que al espacio de manera que no toquen el marco.
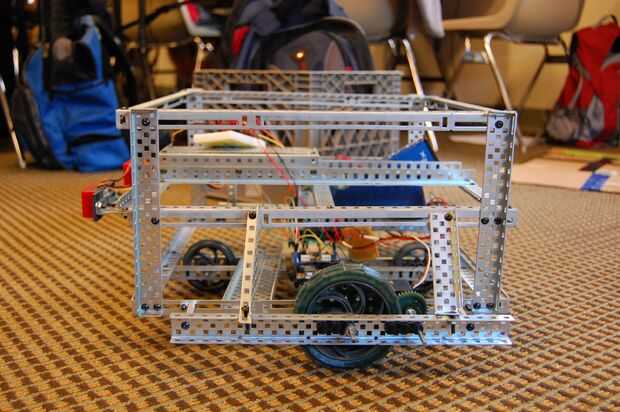
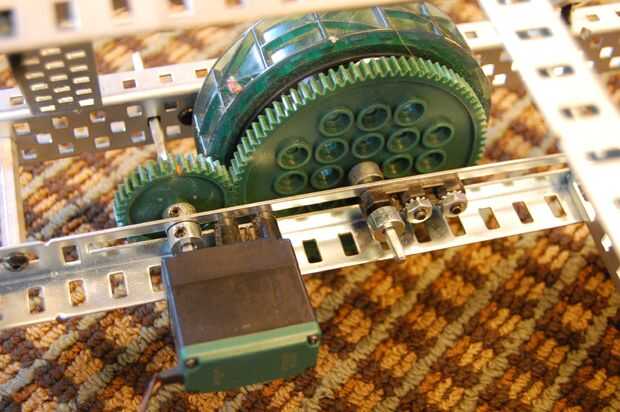
10. montar un motor VEX para que sea el eje hacia la parte posterior del robot. El eje debe alinearse con la ranura 9 de ángulo ranurado de la parte posterior. En esta secuencia en el eje: motor, collar del eje, ángulo ranurado, collar eje, engranaje de 36 dientes, eje collar, collar de eje.
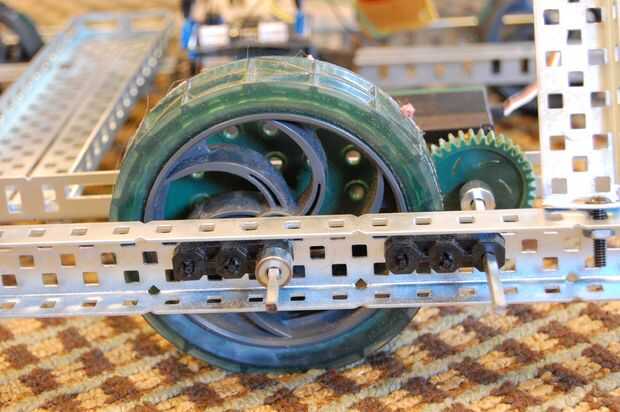
11. fijar el eje de la rueda para que se alinee con la ranura de la 14, pero se asegura de que el equipo que trata de conectar se conecta a otro equipo. En este orden en el eje: collar, cojinete del bloque de almohadilla, ángulo ranurado, collar de eje, 84-diente de engranaje (largo parte hacia la rueda), rueda y collar del eje de eje. Lo mismo para el otro lado.
12. Coloque un canal de C en el marco en el lado izquierdo y derecho mediante separadores de 2". En los orificios para los ejes, coloque el cojinete de plástico del bloque de almohadilla y el eje de la alimentación a través de los agujeros correspondientes. Los cojinetes del bloque deben ser en los agujeros 7-9 con el eje para el pequeño engranaje debe estar pasando por el hoyo 7 y remaches deben fijar el bloque de cojinete en los hoyos 8 y 9 (orificios). Agujeros de 12-14 para el disco si tiene el mismo diseño, agujero 12 para la rueda y 13 y 14 para los remaches.
13. Fije el ángulo ranurado de 7 1/2" a 3 set de dobles orificios en el riel en la parte posterior derecha del robot. El ángulo ranurado debe ser paralelo al lado derecho del robot. Adjuntar 3" canal c pieza para que TI se alinee con la ranura 12 en la parte posterior ranurado pieza acodada en el primer fotograma. Debe fijarse verticalmente y a las ranuras de tiempo. Coloque otro ángulo ranurado de 7 1/2" en el canal de c en el 3 º juego de agujeros doble. Sólo un tornillo puede ser utilizado en este. Después de esto, instale dos placas de metal a ambos ángulos ranurados y fijar un ángulo ranurado de 5" en la parte superior las placas metálicas, una hacia delante y hacia atrás. Esta casa la 9.6v baterías.
14. fijar un canal 10" c-al frente del segundo cuadro, desde el interior de las ranuras de tiempo y saliendo hacia el frente. Centrarlo lo más posible. Luego, coloque los cuatro refuerzos de metal en los sensores ultrasónicos y luego sujete al lejos izquierdo y extremo derecho contra derecho del canal en c.
15. por último, coloque las partes restantes de los metales en los lados (ángulos del c-canal situado al lado de las ruedas a los lados del segundo cuadro) para la ayuda.




")








