Paso 4: Modificar el bosquejo de control H-puente doble impulsión del motor y cumplir.
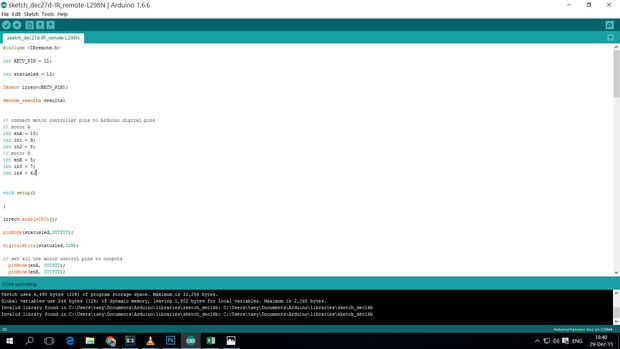
Descargue el bosquejo principal. Antes de cumplir, modificar códigos de los botones de 7 control hexa en el dibujo adjunto para ser sus propio códigos de infrarrojos remoto hexa. Entonces cumplir y subirlo.
Prueba el robot está funcionando correctamente o no pulsando botón de dirección deseado. Si:-
1 motor gire en la dirección equivocada - intercambio de la energía o/p de módulo de impulsión del motor.
2 dormir módulo de impulsión del motor L298N - Compruebe la conexión de tierra entre el módulo de impulsión del motor y controlador Arduino.
3 velocidad de cada motor se puede ajustar cambiando el valor en el bosquejo del dibujo adjunto por defecto de 0-255.In = 100
Gracias a L298N doble puente H impulsión del motor control sub-bosquejo de Tronixlabs.
Y gracias a vigneshraja para sub-bosquejo de control remoto IR.













