Paso 4: mando a distancia


Ahora estoy seguro de que existen mejores técnicas para hacer algunos de estos pasos, pero le guiará a través de los métodos que utiliza.
Alineación de las piezas y montaje sobre una placa de circuito de prototipo para la carcasa de Control remoto
-Cortar un trozo de placa de circuito de prototipos a tamaño adecuado para caber en la carcasa (esperemos que mejor que mi intento).
-Cortar otro pedazo de plástico para el mismo tamaño como la placa de circuito de prototipos. Esto se utiliza como marco para montar temporalmente los interruptores y potenciómetro para la colocación y altura correcta. Voy a referirme a este pedazo de plástico como "el marco" de ahora en adelante.
-Perforar los agujeros de tamaños adecuado en el marco en los lugares apropiados para donde quieres montar el LED y controles
-Fijar controles (interruptores y potenciómetro) y el LED en el marco.
-Tapa en el marco, así que el las patas de los componentes hacia arriba.
-Coloque la placa de circuito del prototipo sobre las piernas de los componentes, paralelas y alineadas con el marco. Te darás cuenta que las piernas es muy probable que no sea la misma altura.
Esta es la parte difícil... Utilicé el encabezado pernos y pernos de cabecera de ángulo recto insertados en la placa de circuito de prototipos para llenar la brecha entre el tablero y los componentes.
-Soldadura de estos pines en la parte posterior de la placa de circuito de prototipos en el correcto lugar y en el lado de componentes, córtelos a la longitud adecuada para cada componente.
-Soldadura de los componentes de las clavijas que sobresalen.
-Retire el marco.
-Para el Sensor de sonido de DFRobot, utilice una fila de 3 pernos de ángulo recto para que el conector se encuentra al ras con la placa de circuito de prototipos.
Cableado
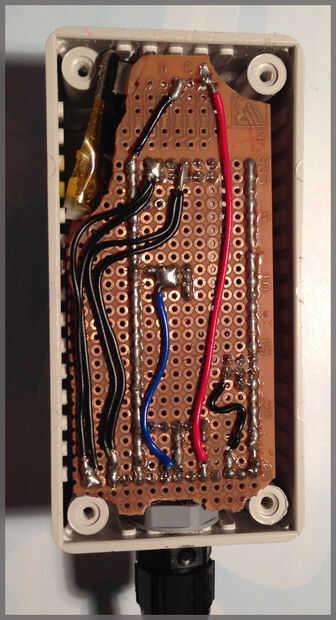
-En la parte inferior de la placa de circuito de prototipos (ver foto), crear pistas con pedazos cortos de alambre de los componentes a la base de la placa de circuito de prototipos. Soldar carriles a lo largo de la izquierda y derecha de la placa de circuito para poder negativo y positivo (tierra y + 5v de Arduino). Esto era útil para simplificar el cableado en el control remoto.
-En la base de la placa de circuito de prototipos, la soldadura de una fila de pines de cabezal de ángulo recto (paso opcional - explicado unos pasos más adelante).
Carcasa de Control remoto
-Utilizar el marco para marcar la posición de los agujeros en el pequeño recinto plástico Universal (caja de control remoto) y perforar el mismo tamaño.
-Perfore un pequeño agujero en la parte superior de la carcasa de control remoto para el Sensor de sonido de DFRobot (puede que necesite hacer esto más adelante para conseguir un posicionamiento exacto de este agujero correcto)
-Perfore un orificio en la base de la carcasa de control remoto para el ojal de calibre.
-Una calibre ojal al caso y asegúrelo con la tuerca de bloqueo.
-Alimentar el cable remoto a través del ojal del medidor en el recinto.
Conexión del Cable de Control remoto
Bajo el título de "Cableado" mencioné que era opcional para tener los pins de encabezado en el circuito prototipo. Esto es porque los alambres de los cables de control remoto pueden soldarse directamente sobre el tablero.
-En los pernos de la cabecera, soldar el ethernet cable sobre los pasadores y calor retráctil para aislar.
El Control remoto de cierre
-Inserte el Sensor de sonido de DFRobot en la carcasa con el micrófono apuntando en la dirección de la parte superior de la carcasa. Montara mina perpendicular a la placa del circuito del prototipo debido a una limitación de espacio (esto se aprecia en la foto).
-Alinear los componentes en la carcasa
-Insertar tabla
-En el exterior de la caja, coloque las tuercas y el potenciómetro, interruptor de modo de interruptor.
-Atornillar la caja cerrada
-Pop de la perilla de goma del potenciómetro
Control remoto... HECHO! Notas:
Usted puede haber notado el cable negro y amarillo, enrollado en el cable de ethernet. Porque utilicé dos cables para la principal potencia positiva y 2 cables para la principal potencia negativa, me quedo sin cable y cables extras dos envueltos alrededor. Usé 4 cables para energía principal como no tuve ninguna pista si un cable sería suficiente para alimentar todo el sistema - para su, yo quería ser como la conciencia de la energía como sea posible.



")


")



")


