Paso 17: Diseño iteraciones
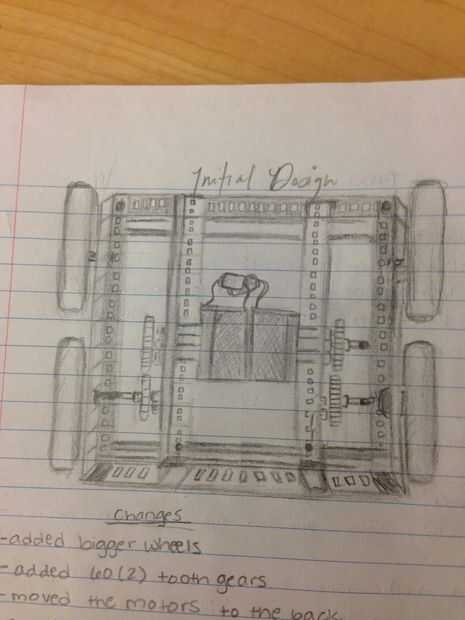
Hicimos varios cambios a nuestro robot VEX original.
-Decidimos tomar 2 de los engranajes de diente 4 36 el robot había y los cámbielos por engranajes de diente 2 60 (2 en ambos lados). Hemos hecho el cambio porque creíamos que engranajes más grandes ayudarían el robot Tire más peso aunque disminuiría la velocidad.
-Hemos decidido añadir las ruedas más grandes puesto que íbamos a utilizar engranajes de dientes 60 porque pensábamos que si utilizar engranajes más grandes, entonces ruedas más grandes iban a ser necesarios para acomodar el cambio al robot.
-Pasamos los motores en la parte posterior del robot desde su posición original en el medio porque queríamos hacer el robot más pequeño y menos concurrido.
-Hicimos la rejilla del robot inferior y poner el controlador en la parte superior para que el robot vería amplias y permitiría que un lugar para la batería así.













 de pescado")
