Paso 10: hacer un seguidor de línea
Este es el código para la línea siguiente en un robot de arduino usando un solo
Sensor reflectante infrarrojo QRD 1114. no dude en hacer mejoras, como
Este es un software muy simple.
const int izquierda = 9; motor izquierda
const int derecha = 11; motor adecuado
Asegúrese de conectar estos pines a través de transistores.
int val = 0; almacenar valor de sensor
void setup() {}
pinMode (derecha, salida);
pinMode (a la izquierda, salida);
}
void loop() {}
Val = analogRead(0);
Si (val < 100) {}
digitalWrite (derecha, baja);
digitalWrite (izquierda, arriba); Si la superficie es blanco gire el motor izquierdo
a y la derecha.
} else {}
digitalWrite (a la izquierda, baja);
digitalWrite (derecha, alto); Si la superficie es negra gire a la derecha motor en
y el motor izquierdo.
}
}
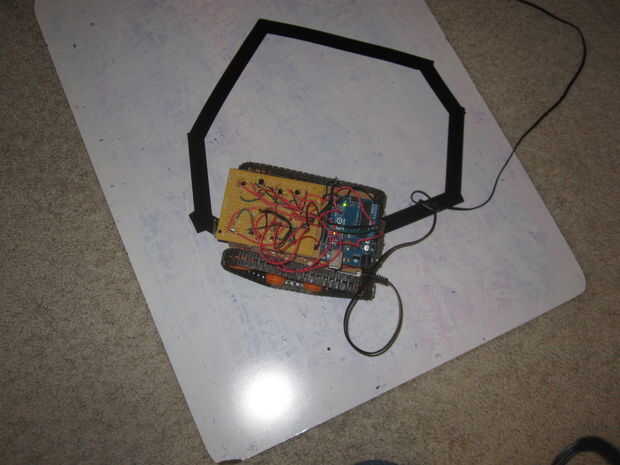
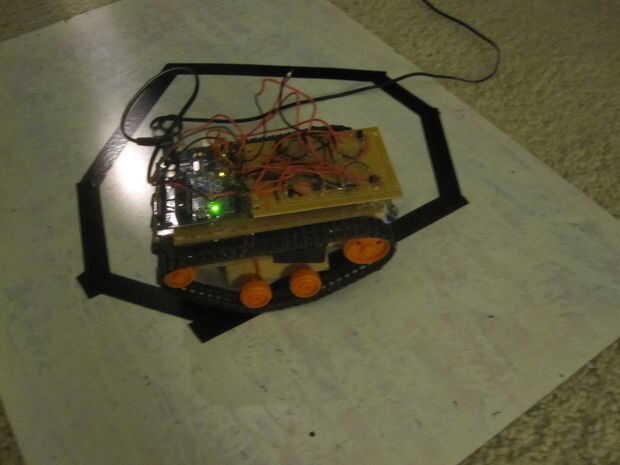
Nota: El robot debido a la naturaleza del código, se se mueven relativamente lentamente a lo largo de la línea, no creo que realmente lo puede hacer ir mucho mejor con un único sensor. El robot se congele cada ahora y entonces mientras se está ejecutando. Cuando esto suceda simplemente desplazar el robot en cualquier dirección, y seguirá funcionando.





 Básicos Arduino Robot buscador de luz!")







