Paso 1: Piezas y herramientas necesarias
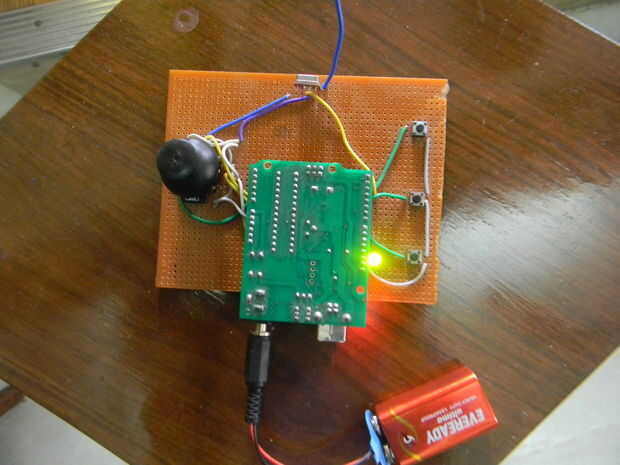

El mando a distancia:
> joystick
> pulsadores
> rollo de alambre sólido
> cabecera mujer tiras
> placa Arduino
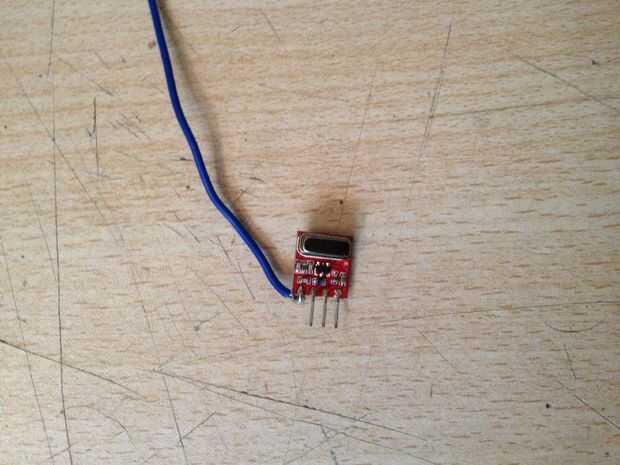
> módulo 433MHz Tx
> batería de 9v
> Perf tablero soldar todo en
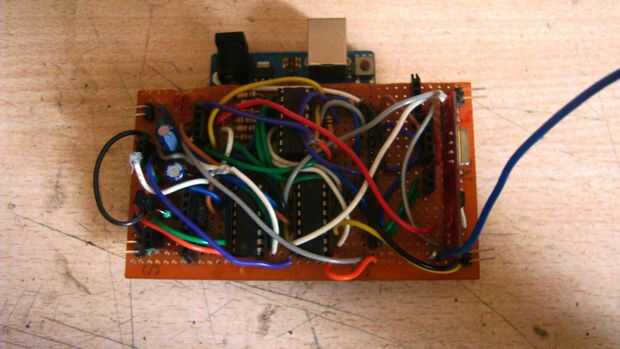
El escudo del Motor: (puede omitir esto si usted compra un motorshield preparada... Necesitaba estos soldar mina!!!!)
> placa de prototipos antes de soldar
> 3 x 16 pines zócalos IC
> 2 x condensadores electrolíticos de 100uF
> 2 X L293D Motor conductor ICs
> 12 x 100 resistencias de Ohm
> rollo de conexión de los cables
> tiras de cabecera hombre y mujer
> Perf board para finalmente soldar todo en.
El analizador Larson:
> 5 x LEDs rojos
> el ATTiny 85 para el analizador Larson (opcional)
> 5 x 220 Ohm resistencias
> 2 x 74HC595 8 bit Shift Register IC
Faros:
> 2 x LEDs blancos
> resistencias 2 x 100 ohmios
> resistencia de ohmios de 10K
> 2N2222A NPN Transistor
> termo retráctil
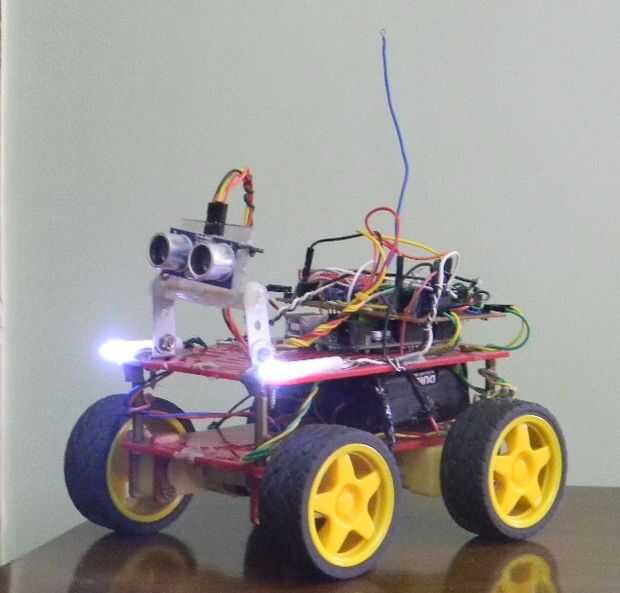
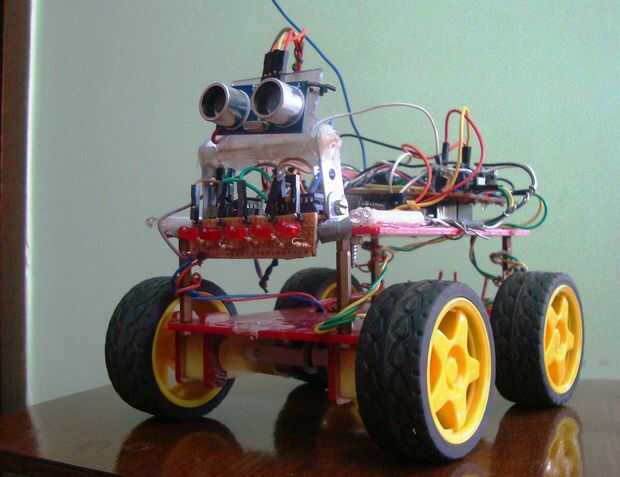
Microcontrolador y chasis:
> 4 ruedas chasis robot.
> Dos Arduinos o clones (uno por cada uno para Tx y Rx)
> HCR04 Sensor ultrasónico
> Rollo de cables
> tiras de cabecera hombre
> Cables de arranque macho y hembra
> 12 x 0 .1uF condensadores de cerámica
Baterías:
> batería de 9V AA para los motores, Rx, Arduino, etc..
> batería de 9V para el mando de Tx.
Herramientas y material misceláneo:
> soldador
> alambre de la soldadura
> ordenador portátil con el IDE de Arduino instalado
> pistola de pegamento
> un viejo caso de Cassette Mini para montar el módulo de HCSR04... o algo similar.
Enlaces:
> 4 ruedas chasis: aquí
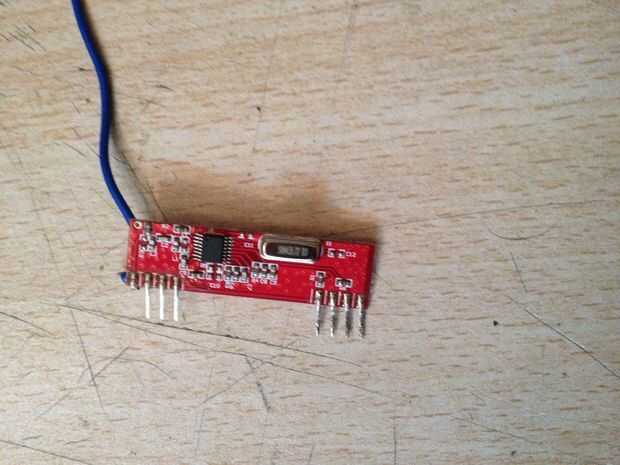
> módulos Tx/Rx: aquí
El resto de los componentes que he comprado de componentes electrónicos locales tiendas ya que son muy baratos!













