Paso 1: Cargar el código de Arduino
/*
Añadir a continuación el código.
Para saber más sobre Arduino, visite nuestro sitio Web.
*/
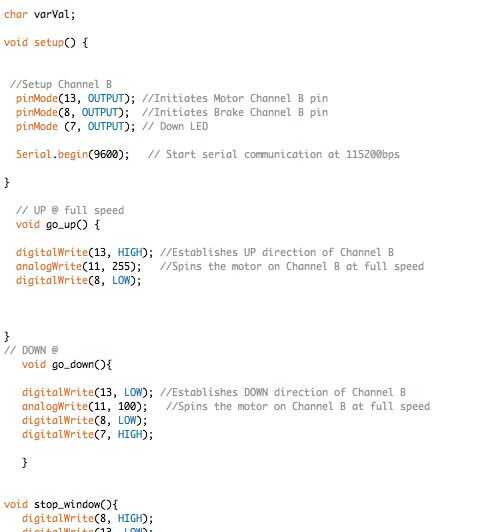
char varVal;
void setup() {}
Configuración de canal B
pinMode (13, salida); Clavija de iniciados Motor canal de B
pinMode (8, salida); Pin de B inicia canal de freno
pinMode (7, salida); Por LED
Serial.Begin(9600); Iniciar la comunicación serie a 115200bps
}
ARRIBA a toda velocidad
void go_up() {}
digitalWrite (13, HIGH); Establece a la dirección de canal B
analogWrite (11, 255); Gira el motor en canal B a toda velocidad
digitalWrite (8, bajo);
}
ABAJO
void go_down() {}
digitalWrite (13, bajo); Establece abajo dirección de canal B
analogWrite (11, 100); Gira el motor en canal B a toda velocidad
digitalWrite (8, bajo);
digitalWrite (7, alto);
}
void stop_window() {}
digitalWrite (8, HIGH);
digitalWrite (13, bajo);
digitalWrite (7, bajo);
}
Leer puerto serie y ejecutar comando
void windowCommand() {}
Si (Serial.available()) {}
varVal = Serial.read();
}
Si (varVal == 'f') {/ / hasta
go_up();
} else if (varVal == 'b') {/ / abajo
go_down();
} else if (varVal == ' t ') {/ / Stop
stop_window();
}
}
void loop() {}
windowCommand();
}













