Paso 1: Reunir las piezas que necesitará.

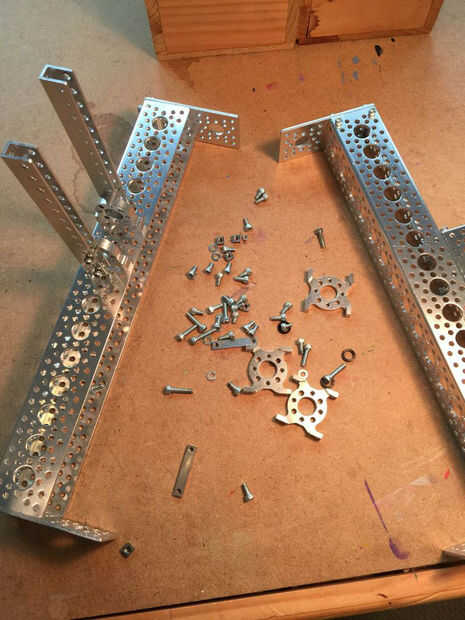

Esto es lo que usé:
- Actobotics del canal (3) reguladores de ServoCity
- 45 rpm motorreductores de precisión (3) de ServoCity
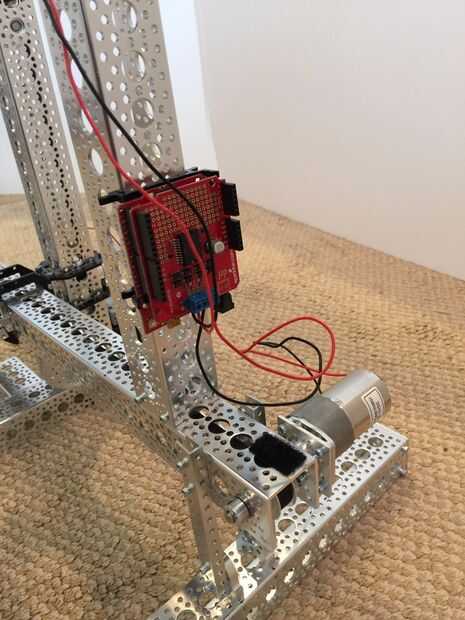
- electrónica para el control de los motores, incluyendo:
- RedBoard y Ardumoto controlador de SparkFun Electronics
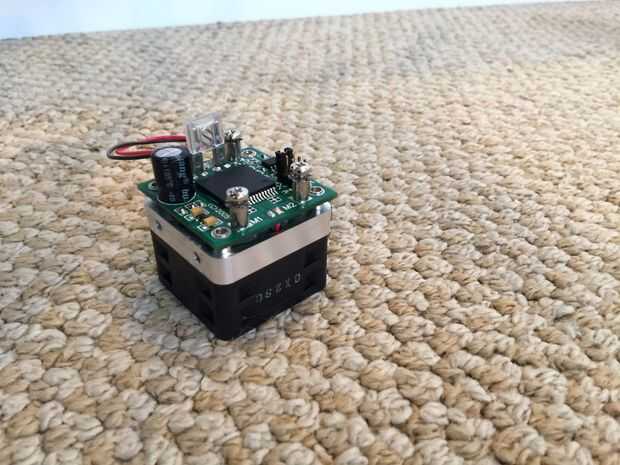
- Regulador del motor de HB-25 de paralaje
- potenciómetros de eje largo de 5k ohm (2) y finales de carrera (2) de Radio Shack
- Actobotics las partes, incluyendo:
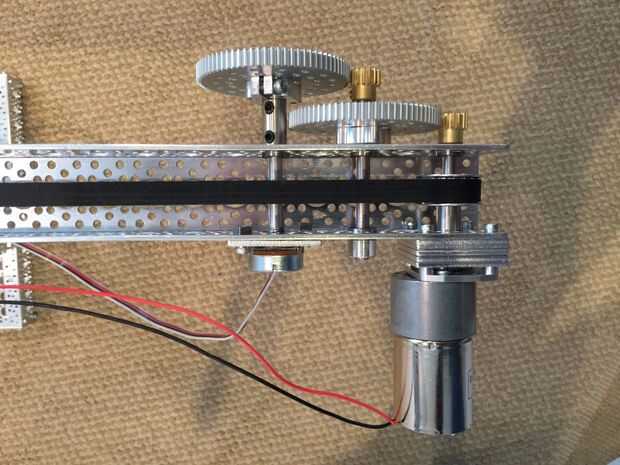
- engranajes, piñones, acoplamientos y cojinetes para conectar los potenciómetros a la salida del motor
- vario tamaño, canales de aluminio, soportes y pequeño hardware para construir "piernas" y los "pies"
- longitud de correa dentada, rodillo 10-ft
- canal deslizador soporte tipo "A" (2) y tipo "E" (2)
- baterías de 9V (2)
- Hook-up de alambre, protoboard y bridas según sea necesario
- barra de 5 lb para proporcionar contrapeso
Obviamente, partes funcionalmente equivalentes de diferentes fuentes se pueden sustituir por cualquiera de las anteriores. (Por ejemplo, un Arduino Uno y la RedBoard son esencialmente intercambiables. Y conexiones mecánicas pueden ser hechas en cualquier forma obras.) Los motores de 45 rpm tienen mucho par hacer el trabajo pero hacer un robot relativamente lento. Reemplazar con motores de mayor velocidad es posible, pero asegúrate de que tienes suficiente esfuerzo de torsión.
")



")








