Paso 3: Construir el frente y "patas" de nuevo.
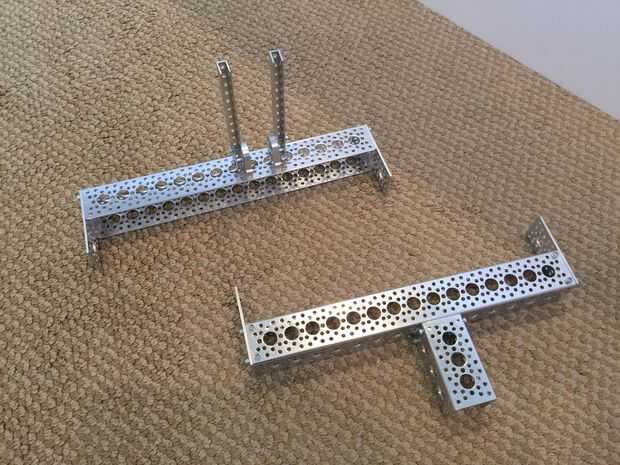
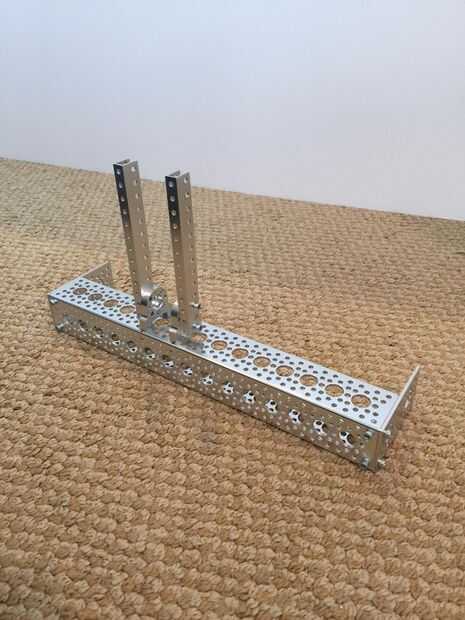

No es de vital importancia que los "pies" se ven exactamente como las fotos. Sólo tienen que proporcionar una base de apoyo para que el robot puede equilibrar en cada pierna. Cualquier material puede ser utilizado. Aquí, 12 pulgadas Actobotics canales proporcionan el ancho de cada pie. El pie de atrás tiene un canal adicional de 3 pulgadas para proporcionar profundidad y dos pies hacen uso de soportes planos duales para proporcionar estabilidad adicional. El pie delantero utiliza 6 pulgadas mini-canales que eventualmente conectará a la Asamblea de la pata delantera.
")



")








