Paso 4: Construir el conjunto de patas posteriores.
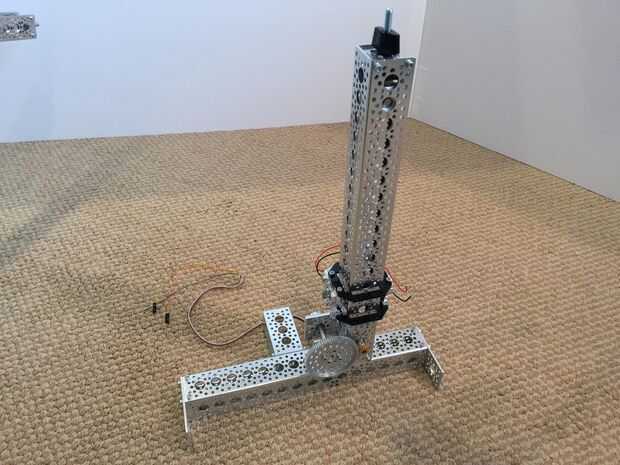
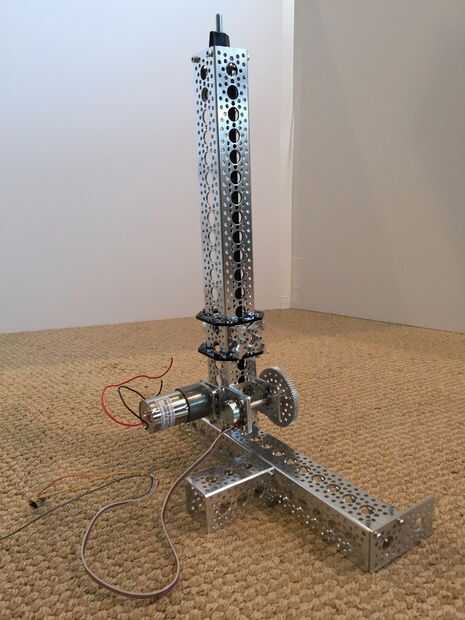
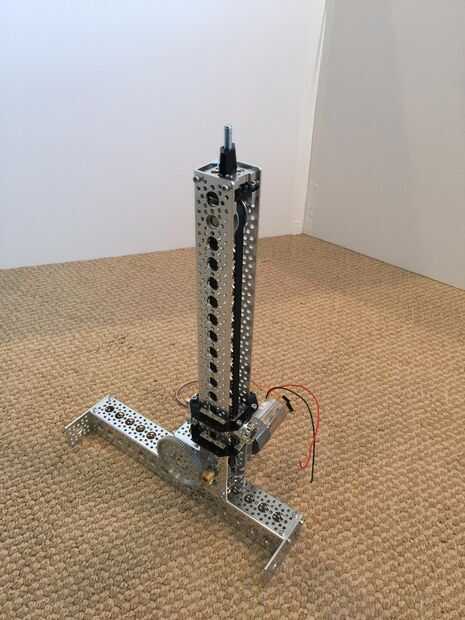
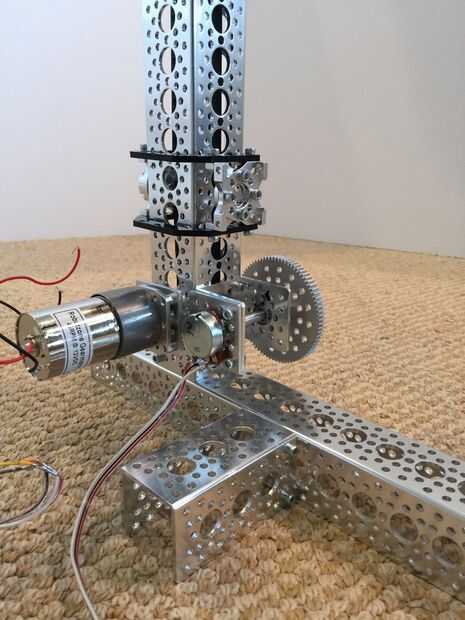



Conectar el "pie" hacia atrás con el deslizador del canal de 15 pulgadas. Aquí, lo he hecho con un montaje de núcleo cuádruple de Actobotics (tipo A) y algunos tornillos, pero otra vez, lo que funcione. El motor de 45 rpm impulsa la cinta deslizante y también se conecta mediante engranajes a un potenciómetro de 5k ohm. El potenciómetro se utiliza para proporcionar retroalimentación a la RedBoard con respecto a la posición del control deslizante, esencialmente diciendo el programa si se eleva o se baja la pierna.
")



")








