Paso 1: partes
Usé ocho servomotores para movimiento, tres por brazo, del cuello y la cabeza.
Ocho RobotGeek 180 grados servomotores:
Estos motores tienen un cuerno rueda loco enfrente del motor y tienen un sistema de riel y soporte que facilita el montaje--disponible en Trossenrobotics.com.
Cinco los soportes laterales del Servo
llave hexagonal de 1,5 mm
Los motores vienen con suficiente m2 y las tuercas para realizar los accesorios.
impresión 3D el torso, piernas y partes de diversos. Esto le llevará más de 25 horas de tiempo de impresión.
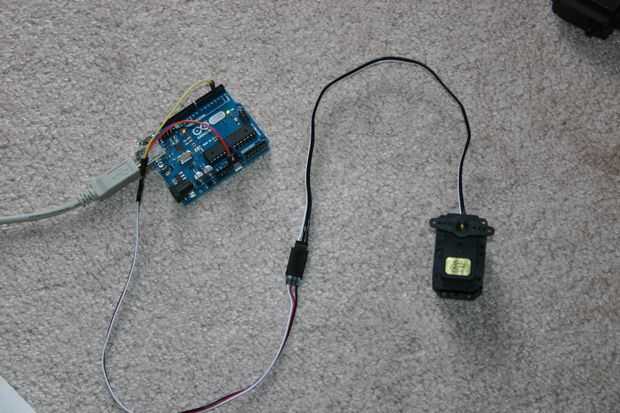
Al llegan de los servos, asegúrese de que están colocados a 90 grados. Ejecutar el sketch de Arduino "dummy noventa grados" (pin 2 es el servocontrol, puede tomarse de Arduino 5v y tierra) para que todos los motores están en la posición media.


--Santa Claus tienda 2016")









