Paso 2: fabricación
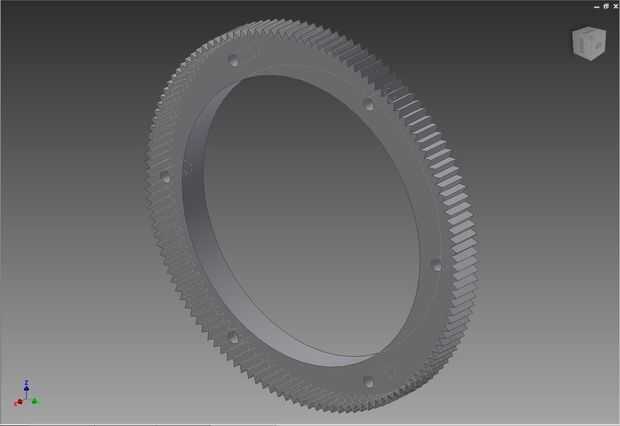
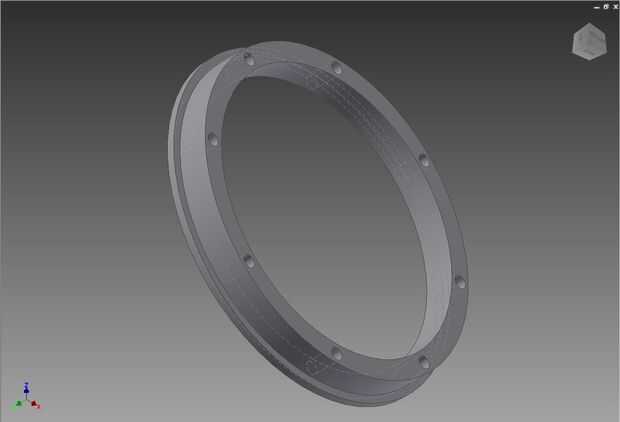
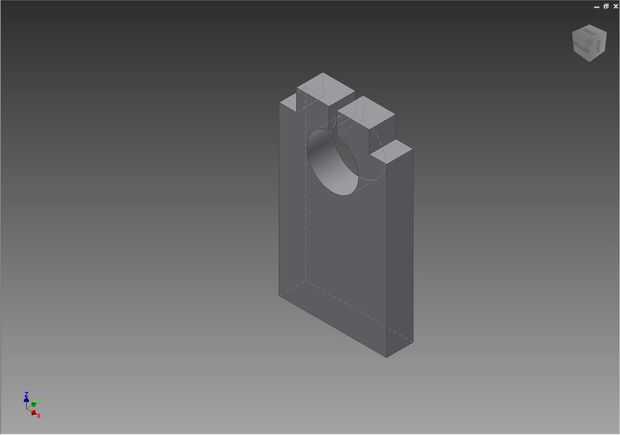
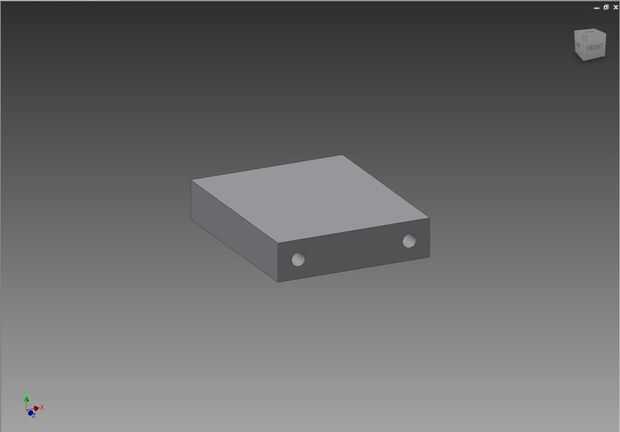
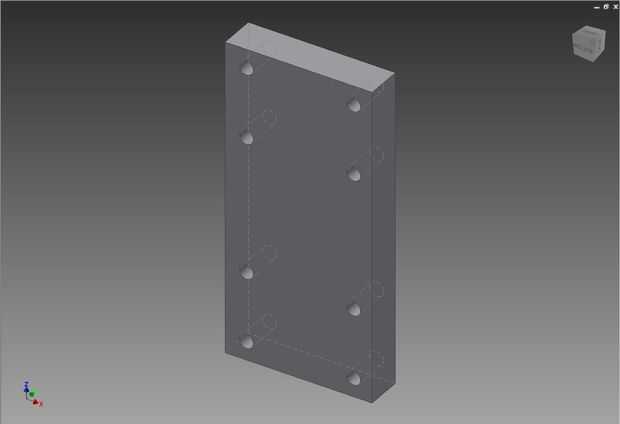
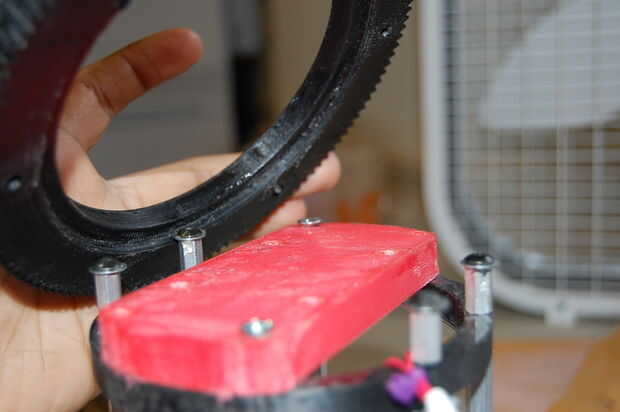


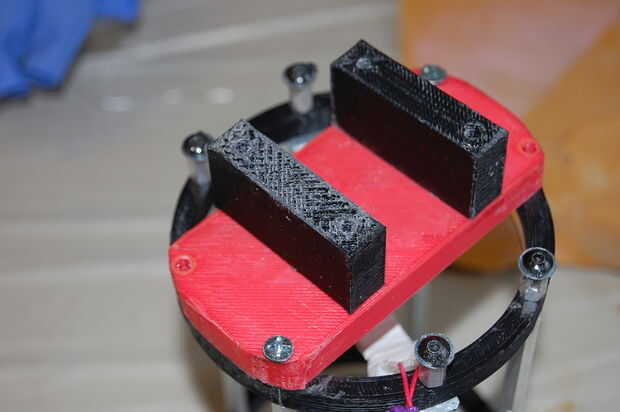

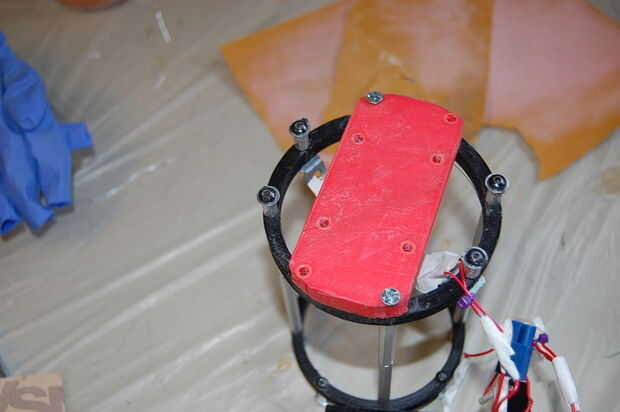
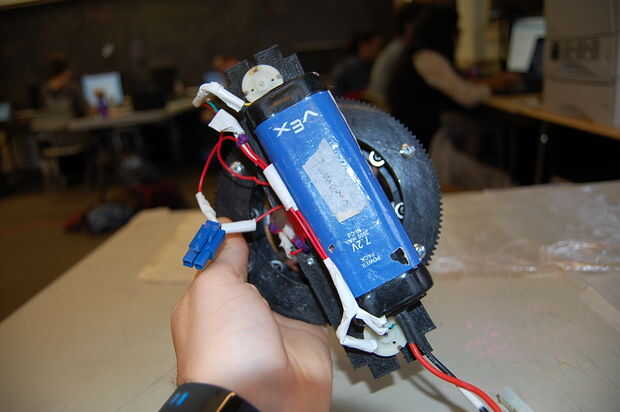

En primer lugar, 3D imprimir ambos engranajes externos y conectar con una combinación de soportes VEX. Se utilizaron dos 3 pulgadas y uno de.5 pulgadas de separadores en cada viga de conexión (x6). En el componente interno, los engranajes internos fueron conectados por un 3 en y un enfrentamiento de dos pulgadas. El engranaje interno gira por 8 separadores de.5 pulgadas a cada lado de deslizamiento en el borde del engranaje externo. La estructura (engranaje exterior y soportes exteriores) fue conectada por tornillos de 1,2 pulgadas. Una vez hecho el montaje externo, debe crearse la Asamblea interna. Luego, coloque el conjunto del interior con el travesaño Unido dentro de la Asamblea externa y el tornillo en el engranaje externo superior. Una vez hecho esto, pueden aplicarse los soportes verticales para sostener los soportes de motor. Una vez en los motores, el momento de iniciar el trabajo eléctrico. El motor tiene un engranaje de 12 dientes VEX en el extremo. El cableado eléctrico es bastante simple.
Batería de una 7.2V VEX:
POSITIVO (+)
Conectar al pulsador-
Pulsador (divide) al diodo para Motor One(-)
Split #2: a diodos de Dos Motor (+)
Negativo de Motor de dos y el positivo del Motor Conecte y vaya a negativa de Battery.




")








