Paso 2: Definición del problema

1. Introducción
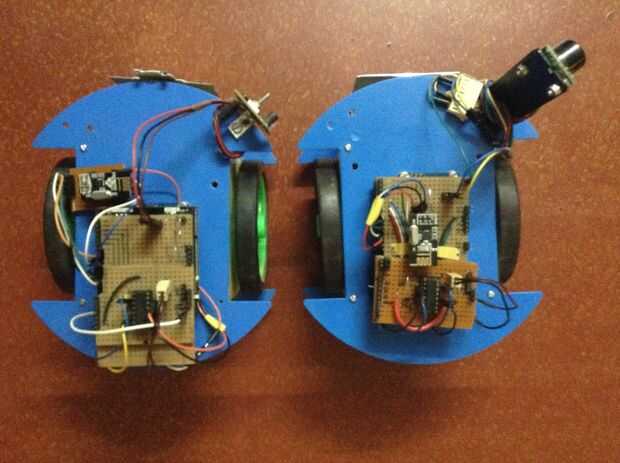
En este capítulo trabajaremos sobre dos objetivo nuestro nuestro proyecto, es decir, uno mismo-Asamblea y transporte cooperativo. En uno mismo-Asamblea dos robot será ensamblado en formación de línea y transporte cooperativo estos dos bot transportarán bloque de un lugar a otro.
1..1 Asamblea del uno mismo de enjambre de robots
Nuestro objetivo en el control de un grupo de s-bots de manera completamente autónoma de tal manera que localizar, acercarse y conectar con un objeto.
1.2 cooperativa transporte
En este trabajo aborda el problema de
un) cómo controlar separados s-bots conectarse autónoma con un objeto o con los demás, y
b) cómo controlar un enjambre-bot o una colección de enjambre-bots para el transporte de un objeto hacia un objetivo.
El diseño y la utilidad de una arquitectura de control híbridas para el control de un grupo uno mismo-montaje de s-bots en una tarea cooperativa de transporte ya han sido estudiados en simulación. El problema ha sido descompuesto en el sub-problems de controlar las acciones.
1. S-bots que puede uno mismo montar. Montado s-bots que son capaces de localizar el objetivo durante el transporte.
2. montar s-bots que son incapaces de localizar el objetivo durante el transporte. Usar un microcontrolador maestro y esclavo.
3. interfaz sensor óptico evita con robot swarm.
4. comunicación SPI desarrollado entre el enjambre de robots.
5. sincronización entre dos enjambre de robots. Transporte limitado del objeto es solamente la limitación de nuestro proyecto.







")





