Paso 3: metodología
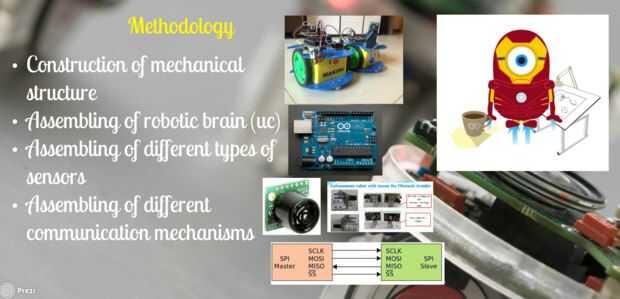
Consisten en los cinco bloque principal del proyecto de enjambre
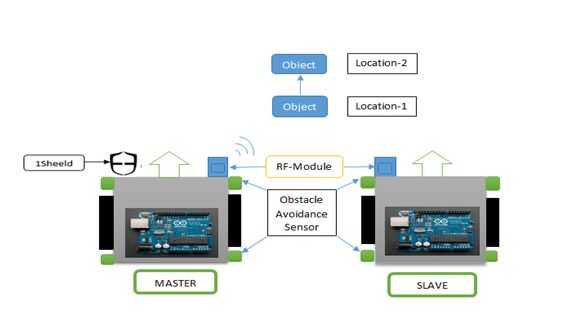
A) Arduino maestro y esclavo: el maestro y el esclavo son dos arduino basado en robots, que cooperan juntos para llevar a cabo la tarea deseada-en nuestro caso transporte de objetos pesados. El maestro controla el movimiento y acciones del esclavo a través del módulo de RF que se explica en la siguiente parte.
B) módulo de RF (nrf24l01): la comunicación entre el maestro y el esclavo lleva a cabo a través del módulo de RF. El maestro envía el comando deseado a través del módulo de transmisor, que es recibido y seguido por el esclavo a través del módulo de receptor unido a él.
C) evita el obstáculo: este es el ojo de los bots. Evita el obstáculo ayuda a los robots para evitar obstáculos no deseados y evita colisión contra otros. Se compone de un sistema de LEDs, que se colocan en el master y slave respectivamente y fotodiodos
D) Sheeld una: la primera parte es un escudo que está físicamente conectado a la placa Arduino y actúa como un hombre de medio inalámbrico, tuberías datos entre Arduino y cualquier Android smartphone vía Bluetooth. Es una plataforma de software y aplicaciones en el teléfonos inteligentes Android que gestiona la comunicación entre nuestro escudo y tu smartphone y dejar que el elija entre diferentes escudos disponibles.
E) LV-MaxSonar: nuestros sensores ultrasónicos son en aire, detección de objetos sin contacto y sensores que detectan objetos dentro de un área que se extiende. Estos sensores no son afectados por el color u otras características visuales del objeto detectado. Sensores de ultrasonidos utilizan alta frecuencia sonido para detectar y localizar objetos en una variedad de ambientes.







")





