Paso 7: Tablero de Control
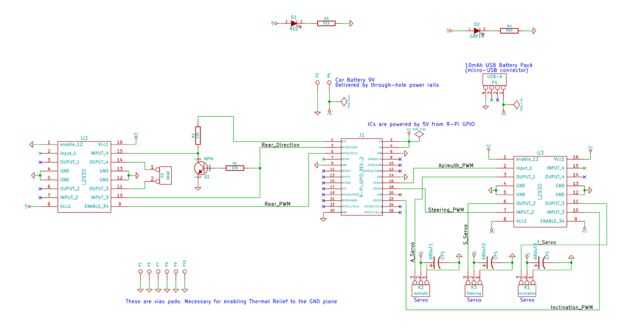
Esta sección describe el circuito de control utilizado para impulsión servos y el motor trasero del puerto GPIO de RPi.
Aunque forma temprano en el proceso para hacer una junta, estoy colocando esta sección aquí b y c que quería mostrarle el esquema. Sería útil que las partes de este circuito de cableado en un protoboard para testear progresivamente las diferentes partes del software que siguen.
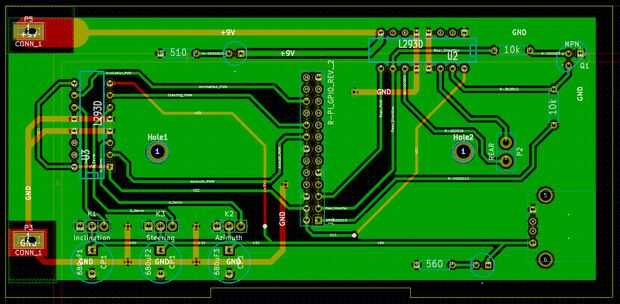
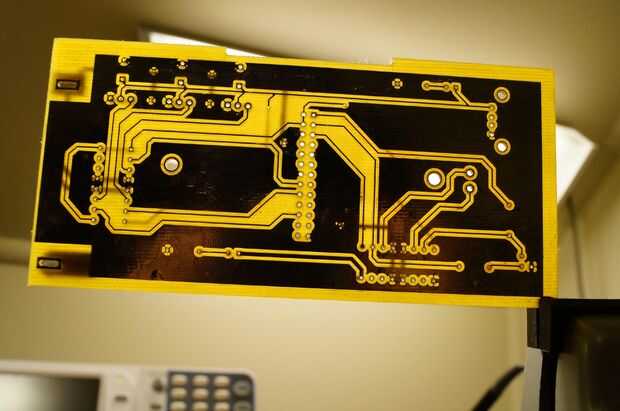
La junta fue diseñada en Kicad (calidad profesional, libre, software de código abierto) y disposición de ProtoMat S103 en mi máquina local (AssentWorks). Adjunto mi proyecto Kicad para este tutorial.
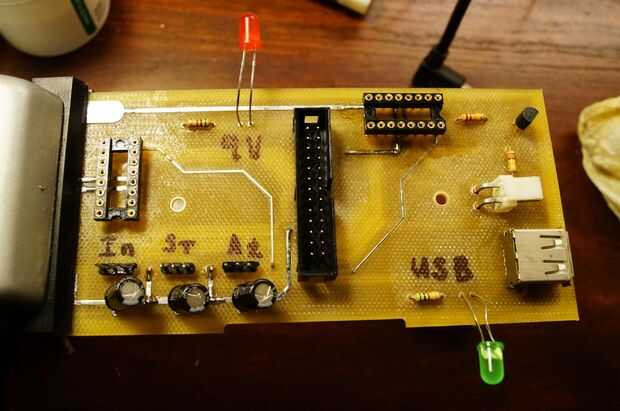
Tenga en cuenta que el conector para el motor posterior fue tomado de la placa original, que estaba dentro del carro.
La forma de la junta fue hecha para reproducir con exactitud la forma de la Junta original. De esta manera he podido reutilizar los anclajes ya existentes y fijar a los postes de la batería de 9V.
El circuito es bastante autoexplicativo, espero. El transistor NPN conectado a la salida de Rear_Direction está actuando como un simple inversor.
Si tienes cualquier duda sobre el esquema o la Junta, no dude de preguntar.





")
")






