Paso 3: El soporte de programación


Pernos no estándar son una mala idea porque usted no podrá utilizar la base con programador de otra persona y viceversa.
Cabeceras de pin hembra fueron divertidas porque podría enchufar LEDs directamente en ellos, pero cuando le empiezo a hacer algo más complejo, que acabaría cableado en un tablero de todos modos. Con la nueva base, corte el intermediario. Menos cableado mano = mejor.
Pero la mayor ventaja de este diseño de cuna que puede conectar en la base de casi cualquier lugar que puede conectar en el chip AVR. Esto resulta para ser enorme. En lugar de diseñar circuitos de ISP en el robot o lo que sea, solo pegan esta cosa de cuna en el zócalo del IC. Entonces puedes programa/re-programa cerebro de tu robot en circuito. Cuando estés desarrollando, conecte directamente el AVR y estás en otro.
Las cunas es bastante fácil, todo lo que necesitas hacer es conectar las clavijas de 6 pines a los lugares correctos en las fichas. Esta vez ' redondo, utilizan PCB grabado al agua fuerte. Así sólo puede mano-alambre todo en perfboard.
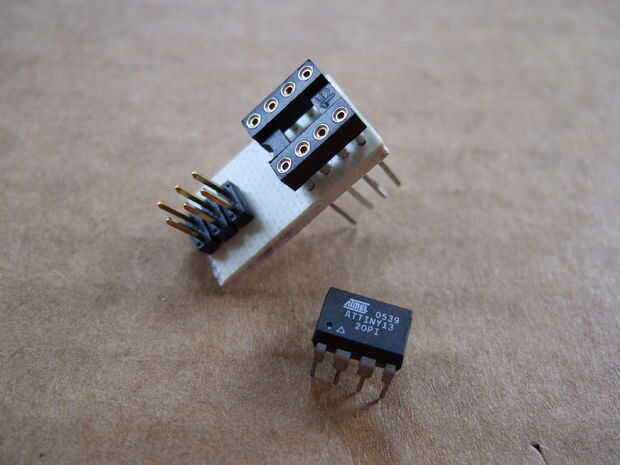
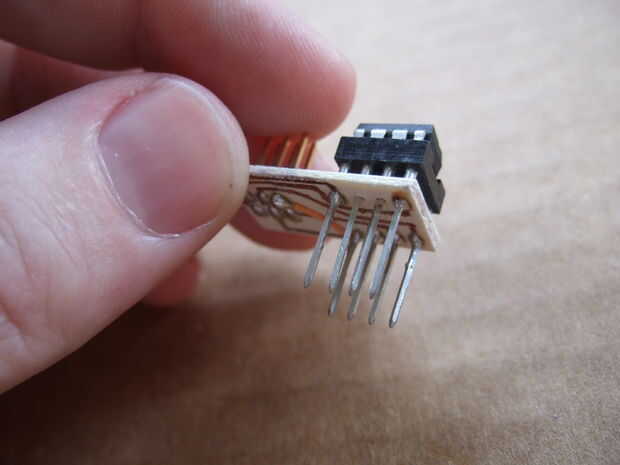
El ATTiny13/15 cuna se hace con un zócalo de 8 pines wire-wrap. Estas me encantan. Es fácil insertar el chip en sus agradables agujeros redondos y piernas largas proporcionan mayor espacio en la protoboard. Hice los rastros de PCB por a mano alzada con un rotulador.
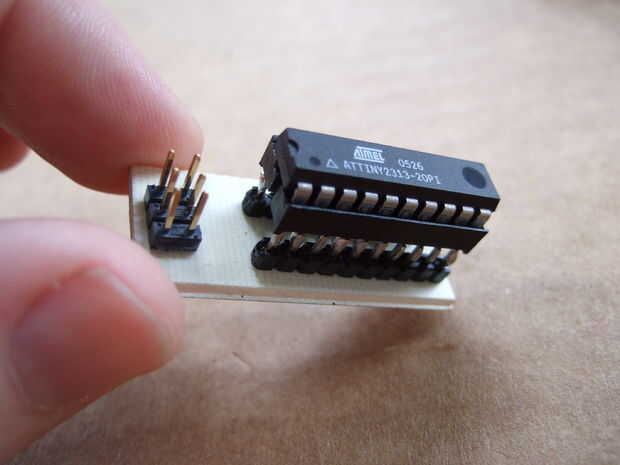
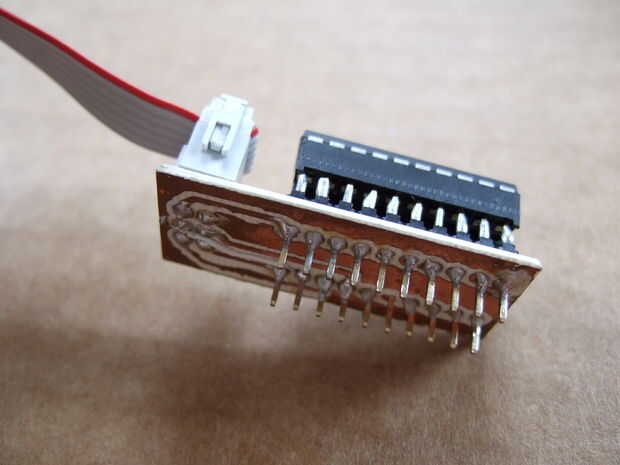
El ATTiny2313 cuna se hizo con el águila y el método de transferencia de tóner láser papel. No pude encontrar ningún tomas 20 pines wire-wrap, así que tuve que recurrir a una toma regular de 20 pines soldada en 2 cabezales de 10 patillas. Esto termina con una base con patas más cortas, pero funciona. El esquema y el PDF que he utilizado para el circuito se encuentran por debajo.
En ambos, tuve a mano hilos una línea adicional. Así es la vida.



 de Ghetto")


")






