Paso 3: Sistema de Control
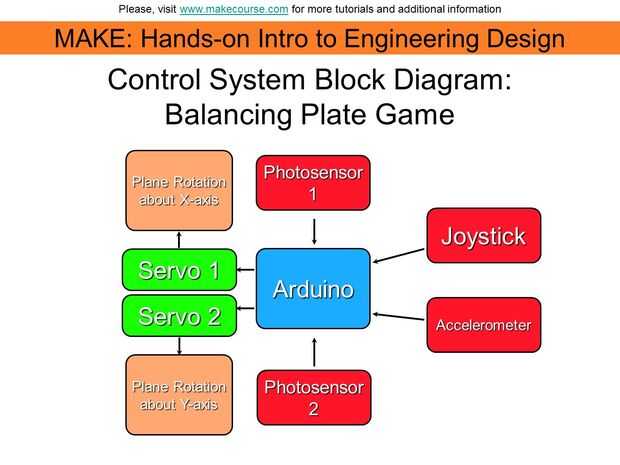
El arduino lleva las señales de los sensores en las cajas rojas y calcula las señales de pwm a actuadores (servomotores en los cuadros verdes). Los servomotores controlan la orientación de la placa.
La señal del acelerómetro es comparada contra el valor deseado y multiplicada por un factor proporcional constante para mover los servos.
El mismo sistema de control proporcional se aplica para las fotocélulas.
La señal de entrada de joystick para el arduino se asigna para una adecuada señal de PWM. (ningún sistema de control proporcional se aplica aquí)













