Paso 9: Conectar el conductor del Motor

Introducción del L298:
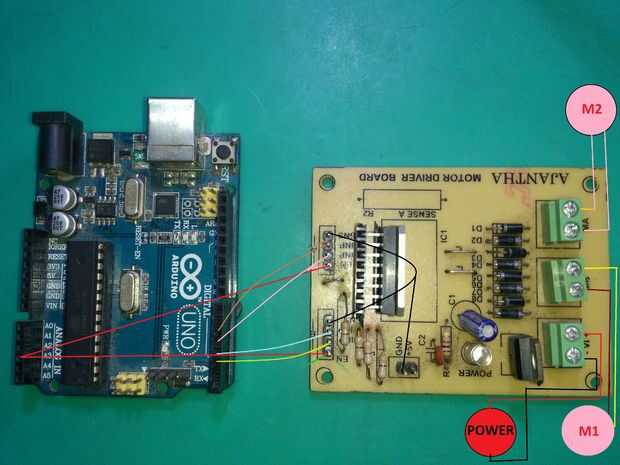
El conductor del motor que he utilizado para este proyecto utiliza el controlador de Motor de puente H Dual L298. Elegí este tablero era sus ventajas sobre otros conductores. El CI L298 tiene un amperaje de 2A. Otra razón es que he quemado unos cuantos controladores Motor L293 debido a su baja capacidad de amperaje. Permite comenzar con los pernos de la Junta del L298.
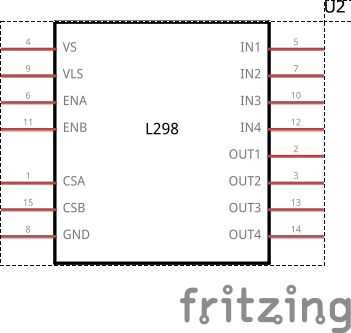
Los pernos de Junta L298:
Activar Pin (ENA y ENB): Este pin debe ser ajustado a alta o la Junta de no procesa la orden a través de los otros pines. Así que este pin permite la IC para recibir comandos de Arduino cuando está dado vuelta alto.
Pin de sentido actual (CSA y CSB): Los pernos de sentido actual en general pueden estar vinculados a la tierra, pero se puede
Coloque el resistor de bajo valor, cuya lectura de voltaje es proporcional a la corriente. Aquí tenemos a atarlos a tierra. Tenga en cuenta que la placa puede o no contener este pin, si a no olvidarse de este pin.
Pins (IN1, IN2, IN3 y IN4) de entrada: Como su nombre indica que estos pins van a Arduino. Donde IN1 y IN2 pertenecen al canal A y IN3 y IN4 pertenecen al canal B. La tabla de verdad para el funcionamiento de dos motores son los siguientes.
| Motor A | Motor B | ||||||
| In1 | In2 | Salida | IN3 | In4 | Salida | ||
| 1 | 0 | HACIA ADELANTE | 1 | 0 | HACIA ADELANTE | ||
| 0 | 1 | MARCHA ATRÁS | 0 | 1 | MARCHA ATRÁS | ||
| 0 | 0 | PARADA | 0 | 0 | PARADA | ||
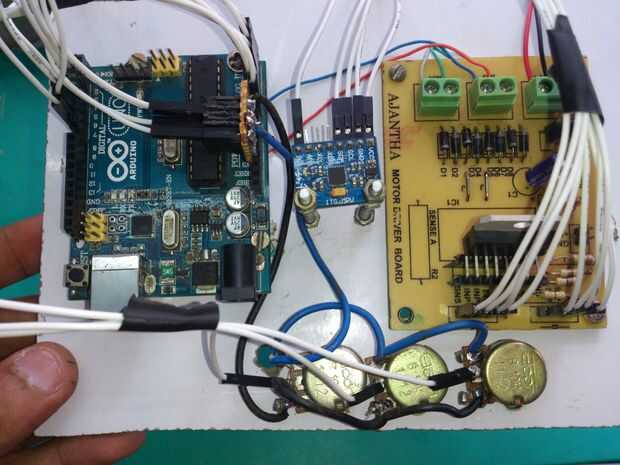
Concluye mi presentación a la Junta de driver motor l298. Esta tarjeta se puede comprar en este link o se puede hacer, yo no he hecho un tutorial sobre cómo hacer tu propio tal vez pronto. He proporcionado un diagrama de cableado para conectar el L298 para el diagrama final de Arduino.The muestra los cables de puente conectado en la base del robot.
____________________________________________
Puesto que ambos los motores son conducidos en la misma dirección nos conectamos al mismo pin analógico de Arduino. Puesto que el Arduino sólo contiene seis pines analógicos, los motores son impulsados por el mismo pin.













