Paso 10: Conexión de la MPU6050

Sobre el MPU6050:
El MPU6050 es uno de los módulos mejores y más baratos de acelerómetro y giroscopio que puede conseguir por ahí. Las funciones desempeñadas por los precios es simplemente excepcional. El módulo tiene Digital Motion Processor™ a bordo (DMP™) capaz de procesar algoritmos complejos de fusión con el movimiento de 9 ejes. La variable que se requieren para este proyecto son sólo el desvío, echada y rodillo, que se utilizan para describir las rotaciones que se producen a lo largo de los tres ejes del robot.
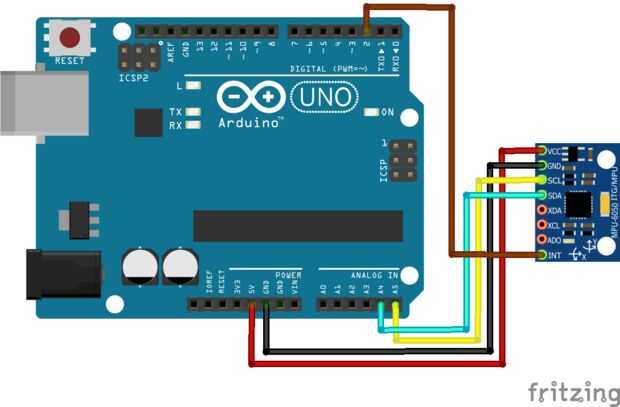
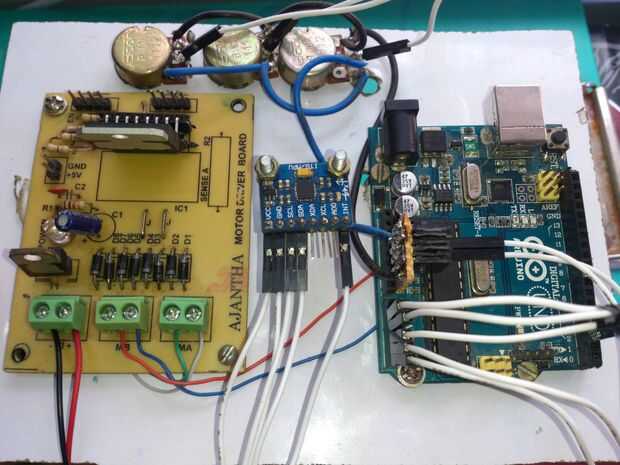
El MPU6050 se pueden comprar para baratos en este enlace. También he proporcionado un bosquejo de Fritzing para conectar el MPU6050. He proporcionado un ejemplo de código con el cual se puede probar el MPU6050. La imagen Final muestra el MPU6050 conectado al Arduino en el robot.
MPU6050 Pernos importantes:
Pin de alimentación (Vcc):
Utiliza para suministrar el voltaje positivo al módulo de MPU6050.
Conector de tierra (GND):
Conecta con el conector de tierra de la Arduino.
SDA y SCL pines:
Utiliza para establecer una conexión con las clavijas analógicas del Arduino A4 y A5 para recibir los datos de acelerómetro y giroscopio.
Interrumpir el Pin (INT):
Este pin indica el Arduino al leer los datos desde el módulo, este pin indica el Arduino sólo cuando los valores cambian.
____________________________________________
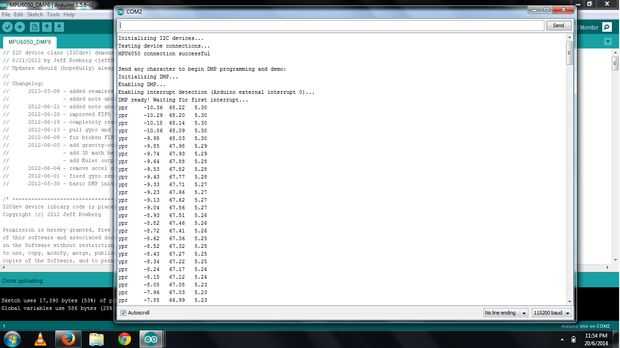
He proporcionado un pequeño código para probar el módulo antes de entrar en el código principal. Este código es hecho por Jeff Rowberg sólo incluyen la biblioteca siguiendo estos pasos:
Cargar la biblioteca:
- Así que abrir el software de Arduino IDE.
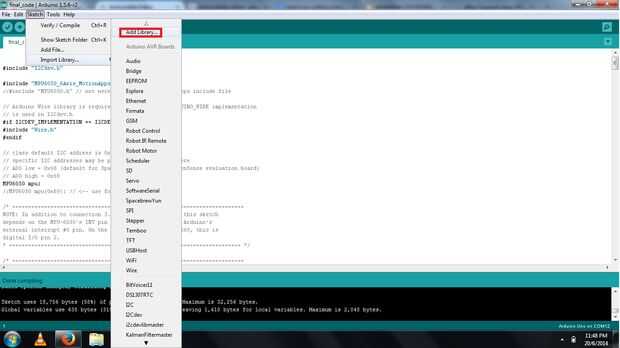
- Ir a bosquejo = > importar biblioteca = > Agregar biblioteca de.
- Seleccione la biblioteca de descarga que han denominado "i2cdevlibmaster" y haga clic en Aceptar.
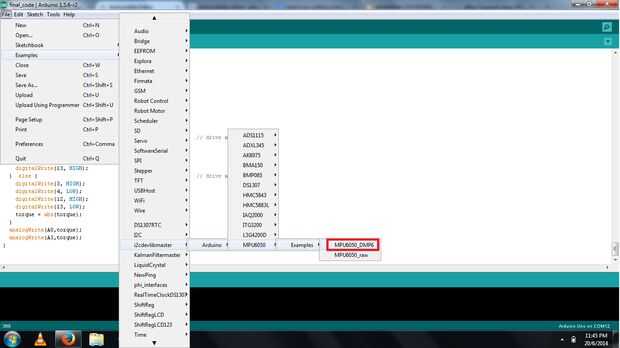
- Ahora que se carga la biblioteca vaya a archivo = > ejemplos = > i2cdevlibmaster = > Arduino = > MPU6050 = > ejemplos = > MPU6050_DMP6.
- Sólo compilar el bosquejo y subirlo para probar el módulo de MPU6050.
- Si todo va bien obtendremos la misma salida que la imagen final.













