Paso 4: Acabado del chasis






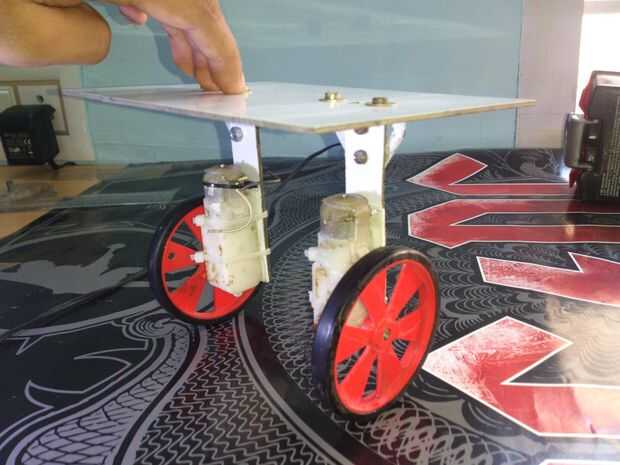
En esta página se completa el chasis del Robot Instructable. El chasis preparado es muy rígido y estable y es capaz de manejar el peso de la batería y la electrónica. Los motores en las fotos están sucios, por favor lo perdone ya que he estado utilizando para mis otros proyectos.
Paso 11:
En este paso que utilizar una abrazadera de L que es básicamente un pedazo que tengo en mi infancia conjunto de ingeniería. También se proporciona que usted podrá fácilmente encontrar abrazaderas en L, un enlace a algunas abrazaderas. De todas formas Coloque la abrazadera sobre el extremo libre de la tira. Luego marque los orificios de la abrazadera usando un marcador.
Paso 12:
Repita el mismo procedimiento para otra tira el motor. Usted obtendrá dos tiras con los agujeros marcados y listos para la perforación.
Paso 13:
Este paso muestra Me Taladre los orificios en ambas bandas del motor. Los agujeros son hechos por una de 4mm broca.
Paso 14:
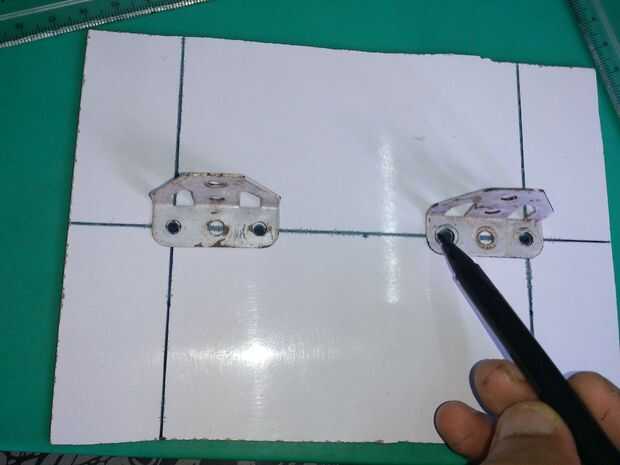
Antes de montar las abrazaderas de las tiras, coloque las abrazaderas en el tablero principal como se muestra en el diagrama. Luego marque los agujeros utilizando un marcador para la perforación.
Paso 15:
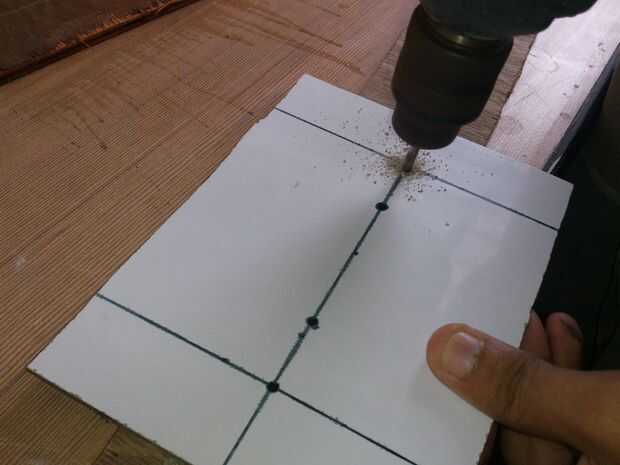
Este paso muestra Me Taladre los orificios en la base del chasis.
Nota:
Sólo perforé dos agujeros en la imagen anterior pero se necesita otro agujero para que los cables pasar a través del chasis. Así que por favor hacer otro agujero.
Paso 16:
Para completar todos estos pasos usted obtendrá las siguientes piezas ensambladas como se muestra en el diagrama.
Paso 17:
No he proporcionado ninguna imagen de apretar las tuercas y los bots pero una vez atornillados, se verá como se muestra en el diagrama.
____________________________________________
Después de completar todos estos pasos el chasis terminado se verá como se muestra en la figura último. El chasis alberga los extremos de la batería, sensores de ultrasonidos y el Electronics.This el trabajo mecánico necesario para este proyecto.













