Paso 6: Montaje Arduino



Se trata de montar el módulo de sensor de giroscopio y la tarjeta Arduino UNO en la base del robot.
Paso 25:
En primer lugar, marque los agujeros para el módulo Arduino en la base con un marcador.
Paso 26:
Taladre los orificios con la misma broca de 4mm. Para el Arduino tres agujeros son suficientes para el montaje en la base.
Paso 27:
Estos pasos muestran los agujeros perforados en la base del robot. Ignore los agujeros adicionales que son de mis anteriores intentos de montaje incorrecto.
Paso 28:
Por último, atornillamos la Arduino a la base utilizando algunos tornillos como se muestra en la figura.
Paso 29:
Coloque el módulo giroscopio en la base y marque los orificios usando el marcador.
Paso 30:
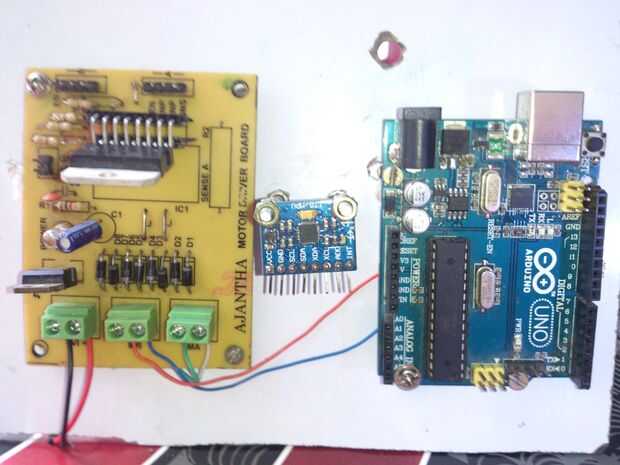
Perforar y montar el módulo tal como se muestra en el diagrama. También he proporcionado una vista lateral del módulo montado en la base. Cuanto más elevado el módulo mejor así utilizar tornillos largos como se muestra.
____________________________________________
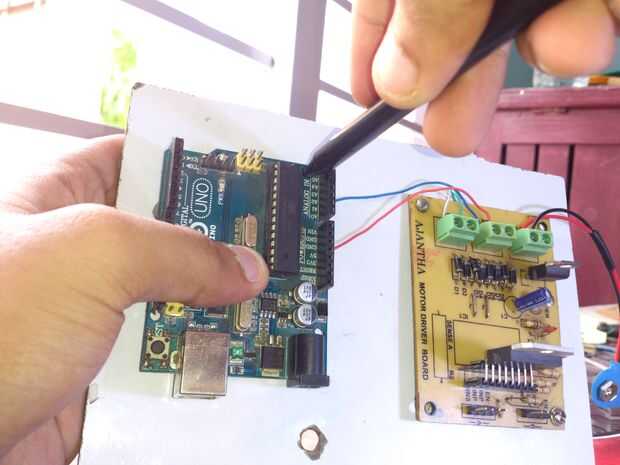
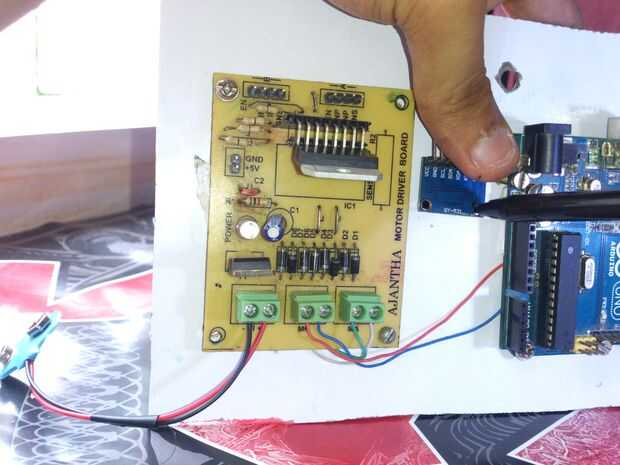
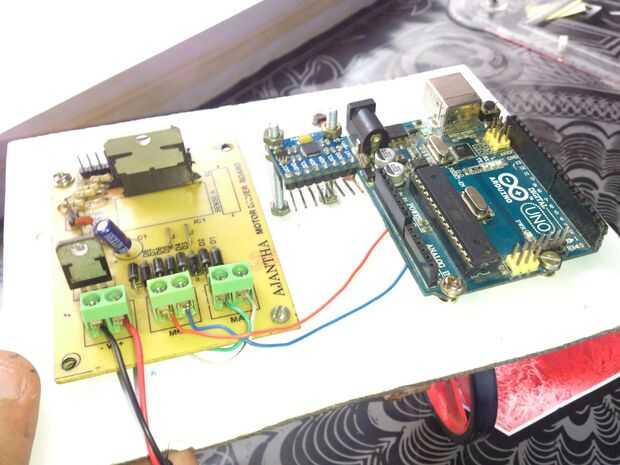
Esto concluye el montaje del módulo controlador de motor, el giroscopio y el Arduino UNO. Tengo siempre el diagrama de cableado de conductor del motor Utilice este diagrama. Conecte las clavijas correspondientes utilizando los cables de puente no muestro los pasos para eso pero creo que he proporcionado suficientes imágenes. La imagen final muestra el chasis con el tablero de conductor del motor y la batería conectada.













