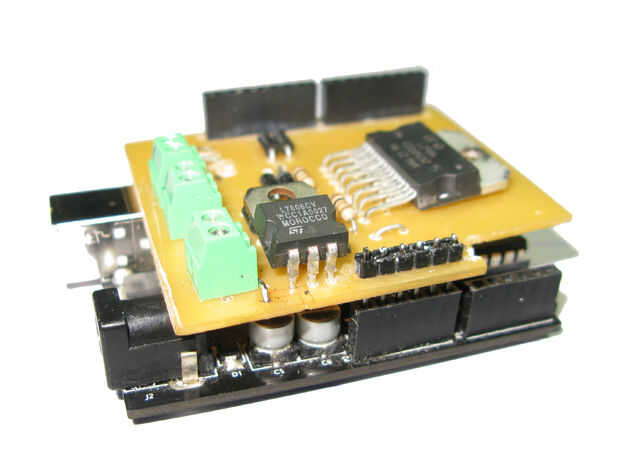

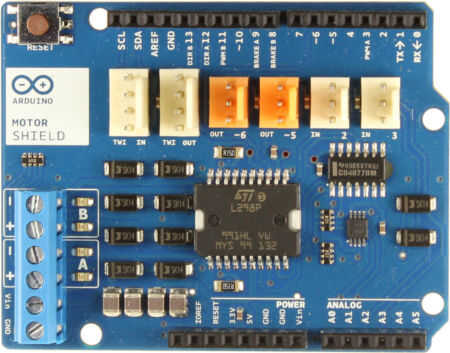
Estructura:
Se controla con 4 pines PWM. Las conexiones son: 11 y 10 para el Motor de R y 6 y 5 para el L-Motor. Con la ayuda de ocho diodos de recuperación rápida (1N4937) muestra una respuesta muy rápida de parada y frenado, por eso voy a utilizar para la competencia de SUMOBOT nacional.
¿Qué es un escudo del Motor?
Un protector de motor es un circuito que conduce diferentes cargas tales como motores, luces y etc... La placa de Arduino (microcontrolador) sí mismo no está diseñada para operar actuales cargas pesadas, por eso utilizamos protectores de motor, es un circuito que es controlado por su placa de arduino para accesorios de alta potencia.
Costo:
Sólo me costó P363.75 (convertidos: $8,87)! Disminuirían los precios a P262.50 (convertidos: $6,40) si pegada a la original plan, ya que es para fines competitional, sustituyó algunas partes con una mayor tasa de respuesta.
Acerca de la guía:
La guía incluye la hoja de datos, esquema, disposición del PWB, Arduino prueba archivos y etc.... Todo lo que necesitas es una hora y la paso 6 instructable.
Especificaciones:
____________________________________________________
Gama del voltaje: 5 - 50 voltios
Gama de corriente: 2 a 4 amperios
Potencia: 25w
Temparature de trabajo: -40 ° C a 150 ° C
Tablero de compatibilidad: Arduino Uno
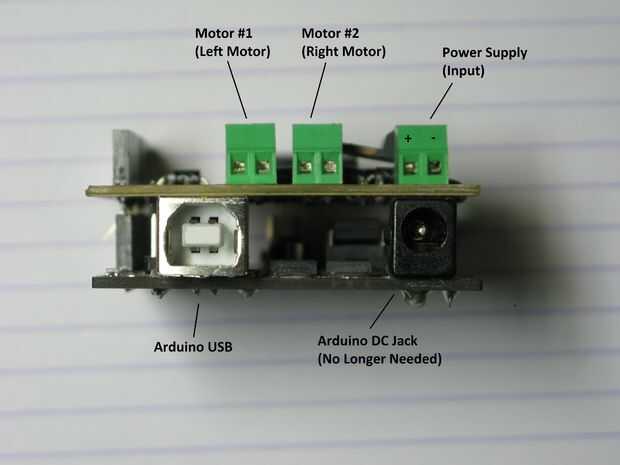
Salidas de motor: 2 motores (izquierda y derecha)
Robot posibles movimientos: Izquierda, derecha, adelante, atrás y etc...
Pines PWM: [12 y 11] [6 y 5]
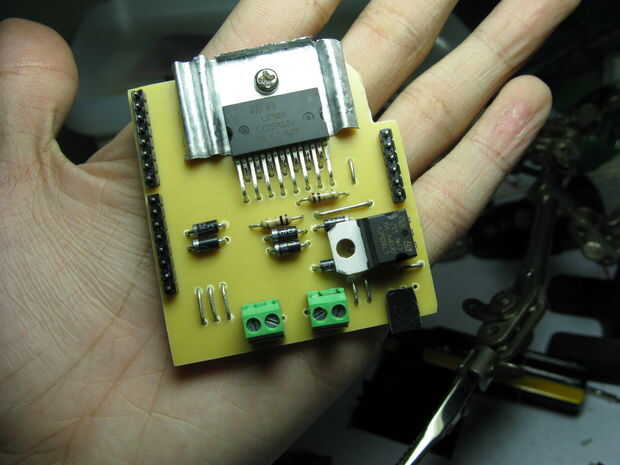
La disposición del PWB es mi diseño original, fue creado utilizando Software Fritzing, por favor pida permiso si alguien está dispuesto a modificar y lo vuelva a publicar.










")

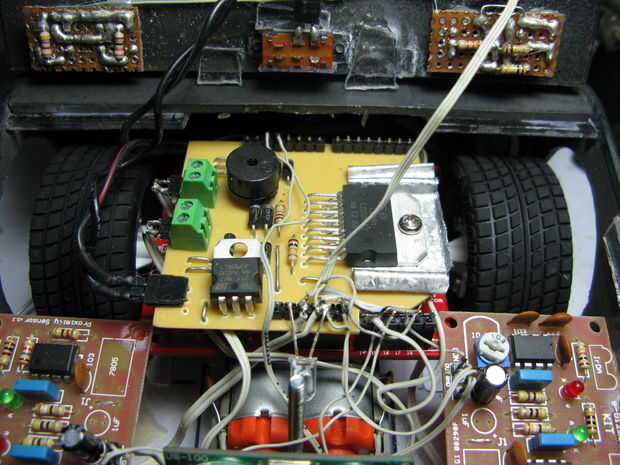
 Chasis de plataforma-un Robot robótica Arduino DIY de piezas de repuesto")
