Paso 2: Motor de Seeed escudo Código 2
Este es el segundo ejemplo de código para controlar el protector de Seeed Motor V2.0 con un Arduino Uno:
___________
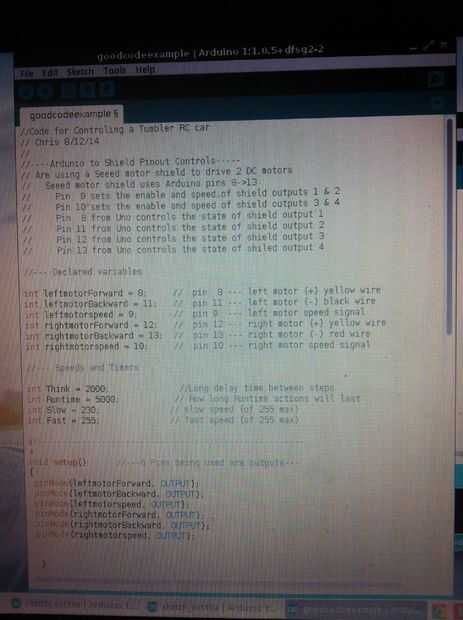
Código para controlar un coche RC de vaso
con Arduino Uno y Seeed Motor Shield V2.0
Chris 12/08/14
/ *---Ardunio escudo Pinout controles---
Está utilizando un protector de motor de Seeed manejar 2 motores
Seeed escudo del motor utiliza pines de Arduino 8 -> 13
PIN 9 establece el activar y velocidad del escudo salidas 1 y 2
PIN 10 establece el activar y velocidad del escudo salidas 3 y 4
Pin 8 de Uno controla el estado de salida del escudo 1
PIN 11 de Uno controla el estado de salida de pantalla 2
Pin 12 de Uno controla el estado de salida de escudo 3
PIN 13 de Uno controla el estado de shiled salida 4
*/
---Declarado las variables
int leftmotorForward = 8; cable de motor (+) verde pin 8---a la izquierda
int leftmotorBackward = 11; cable de motor (-) negro pin 11---a la izquierda
int leftmotorspeed = 9; señal de velocidad del motor PIN 9---a la izquierda
int rightmotorForward = 12; pin 12---cable de motor adecuado (+) verde
int rightmotorBackward = 13; PIN 13---negro motor adecuado (-)
int rightmotorspeed = 10; PIN 10---señal de velocidad del motor derecho
---Velocidad y temporizadores
int pensar = 2000; Tiempo de demora entre los pasos
int tiempo de ejecución = 5000; Cuánto tiempo durará el tiempo de ejecución acciones
int lenta = 230; velocidad lenta (de 255 max)
int rápido = 255; velocidad rápida (de 255 max)
//------------------------------------------------------
void setup() //---6 se utilizan los pernos son salidas---
{
pinMode (leftmotorForward, salida);
pinMode (leftmotorBackward, salida);
pinMode (leftmotorspeed, salida);
pinMode (rightmotorForward, salida);
pinMode (rightmotorBackward, salida);
pinMode (rightmotorspeed, salida);
}
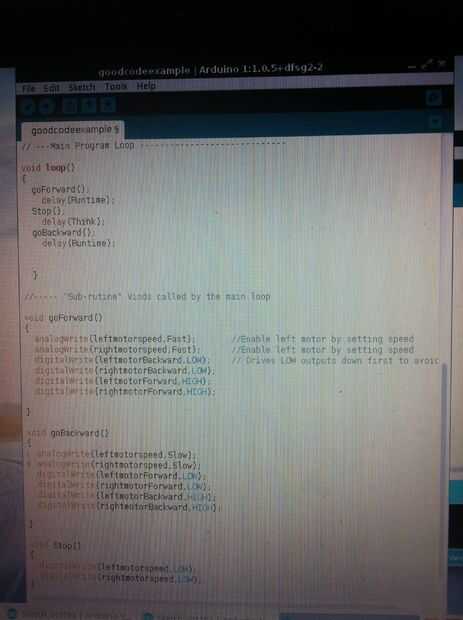
---Bucle principal del programa---
void loop()
{
goForward();
Delay(Runtime);
STOP();
Delay(Think);
goBackward();
Delay(Runtime);
}
---"Sub-rutina" huecos llaman por el bucle principal
void goForward()
{
analogWrite(leftmotorspeed,Fast); Motor izquierda para habilitar configuración de velocidad
analogWrite(rightmotorspeed,Fast); Motor izquierda para habilitar configuración de velocidad
digitalWrite(leftmotorBackward,LOW); Unidades de salidas de baja hacia abajo para evitar daños
digitalWrite(rightmotorBackward,LOW);
digitalWrite(leftmotorForward,HIGH);
digitalWrite(rightmotorForward,HIGH);
}
void goBackward()
{
analogWrite(leftmotorspeed,Slow);
analogWrite(rightmotorspeed,Slow);
digitalWrite(leftmotorForward,LOW);
digitalWrite(rightmotorForward,LOW);
digitalWrite(leftmotorBackward,HIGH);
digitalWrite(rightmotorBackward,HIGH);
}
void Stop() / / pins velocidad se establece en deshabilitar ambos motores de baja
{
digitalWrite(leftmotorspeed,LOW);
digitalWrite(rightmotorspeed,LOW);
}


![Escudo del Motor Arduino DIY [por sólo $8!] (L298N 2x4A)](https://foto.askix.com/thumb/170x110/9/44/944b4e3d55d5395583213b4d0d36ee0e.jpg "Escudo del Motor Arduino DIY [por sólo $8!] (L298N 2x4A)")










