Paso 5: De arriba hacia abajo de Cont...
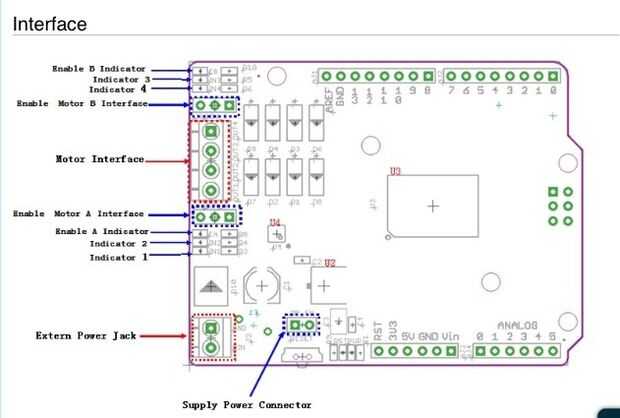
Buscando en la Web de Seeed que encontré la información que se observó en el bosquejo del Código 2 º presentado anteriormente. Y admisible qué motor lleva el chasis del robot si da (+) tensión produjo las 2 direcciones.
Determinar lo que desea llamar a cada motor / leftmotor / rightmotor /motor1 / motor 2. Y las señales de control a los conductores de los motores.
Mano corta "Codey" es bonito pero no soy constante en lo que mi 'nombres de versión de' y terminan con un lío caliente. Así que he adoptado sólo nombres cosas lo que naturalmente llamaría luego. (¿Qué código es para la derecha?) Entonces aunque sea más pulsaciones las etiquetas son más intuitivas de la escritura se vuelve más fluido y menos errores están probables.
Opté por usar leftmotor / rightmotor. Las señales de motor son nombres que hacen referencia al cable de conexión para la (+) señal y qué dirección esto enviará el robot.
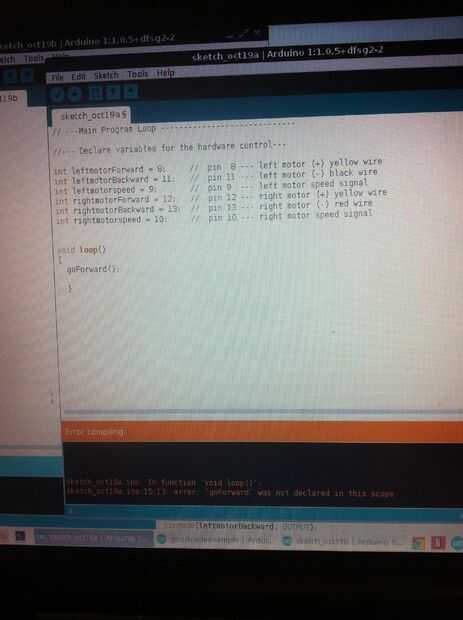
Así que lo que necesita saber al principio del Sketch Arduino es qué acciones están vinculadas a qué pins. Por lo que en la parte superior del bosquejo después de las notas definir cosas.
int leftmotorForward = 8;
int leftmotorBackward = 11;
int leftmotorSpeed = 9;
int rightmotorForward = 12;
int rightmotorBackward = 13;
int rightmotorspeed = 10;
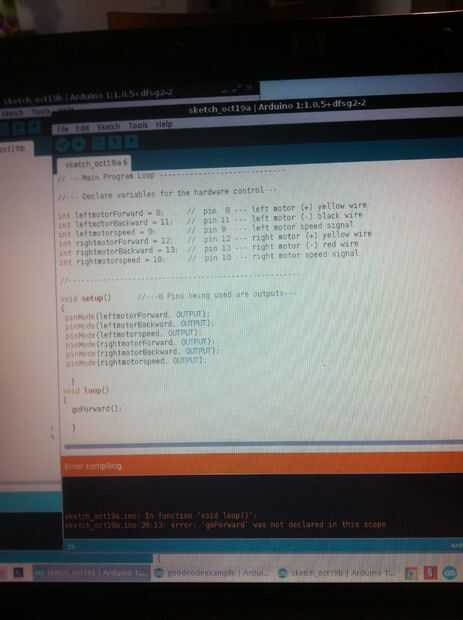
Ahora el Arduino nos necesita para establecer los modos de pin para los pernos anteriores que dijimos que queríamos utilizar...
Todos los pernos se utiliza aquí serán salidas tan...
void setup()
{
pinMode (leftmotorForward, salida);
pinMode (leftmotorBackward, salida);
pinMode (leftmotorspeed, salida);
pinMode (rightmotorForward, salida);
pinMode (rightmotorBackward, salida);
pinMode (rightmotorspeed, salida);
}


![Escudo del Motor Arduino DIY [por sólo $8!] (L298N 2x4A)](https://foto.askix.com/thumb/170x110/9/44/944b4e3d55d5395583213b4d0d36ee0e.jpg "Escudo del Motor Arduino DIY [por sólo $8!] (L298N 2x4A)")










