Paso 6: Terminar el bosquejo...
En este punto nuestro dibujo se ve así...
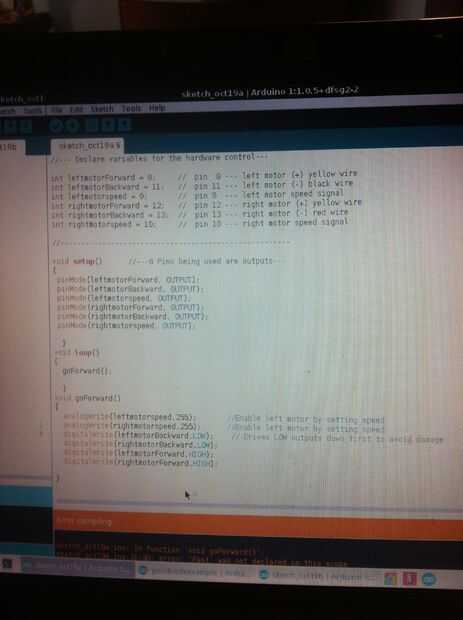
int leftmotorForward = 8;
int leftmotorBackward = 11;
int leftmotorSpeed = 9;
int rightmotorForward = 12;
int rightmotorBackward = 13;
int rightmotorspeed = 10;
void setup()
{
pinMode (leftmotorForward, salida);
pinMode (leftmotorBackward, salida);
pinMode (leftmotorspeed, salida);
pinMode (rightmotorForward, salida);
pinMode (rightmotorBackward, salida);
pinMode (rightmotorspeed, salida);
}
void loop()
{
goForward();
}
Somos casi terminados. En este punto que nos faltan lo unico es que no hemos definido lo que la goForward() se supone que haga. Si has intentado ejecutar el bosquejo en su momento el paso de verificar probablemente diría algo al respecto.
Así que para ir hacia adelante tenemos que poner energía (+) (impulsión de este perno alto) a los hilos de izquierda y derecha motores que tendrá el robot hacia adelante y fregadero (-) (o unidad baja si te gusta eso mejor término.) conduce el otro motor de 2. Hemos trabajado ya a las conexiones de hardware lo que sea antes de nombrar a los pasadores declarados para avanzar el ___Forward pines deben ir alto el ___Backward pines tiene que ir bajo.
El escudo del Motor de Seeed también necesita saber qué velocidad queremos ir en un valor de 0 (off) al 255 (máximo).
Así crear el lazo de goForward();
void goForward()
{
analogWrite(leftmotorspeed,255);
analogWrite(rightmotorspeed,255);
digitalWrite(leftmotorBackward,LOW);
digitalWrite(rightmotorBackward,LOW);
digitalWrite(leftmotorForward,HIGH);
digitalWrite(rightmotorForward,HIGH);
}
En este punto debe ser capaz de ejecutar este bosquejo. Pero tenga en cuenta que en el goForward() definido anteriormente la velocidad 255 no es rápido como el original presentado el código 2.
Los contadores de tiempo y velocidades en el código 2 son opcionales, pero definiendo las condiciones en el inicio que usted desee afinar o ajustar permite cambiarlos sin tener que buscar por todas partes en el código en las declaraciones.


![Escudo del Motor Arduino DIY [por sólo $8!] (L298N 2x4A)](https://foto.askix.com/thumb/170x110/9/44/944b4e3d55d5395583213b4d0d36ee0e.jpg "Escudo del Motor Arduino DIY [por sólo $8!] (L298N 2x4A)")










