Paso 1:
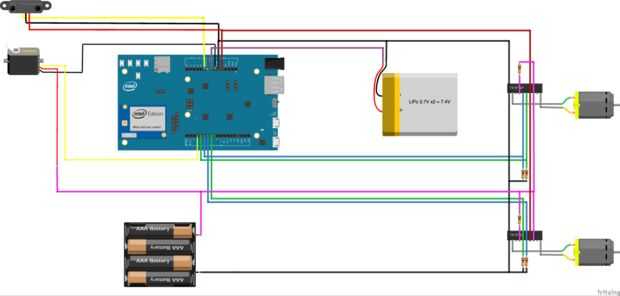
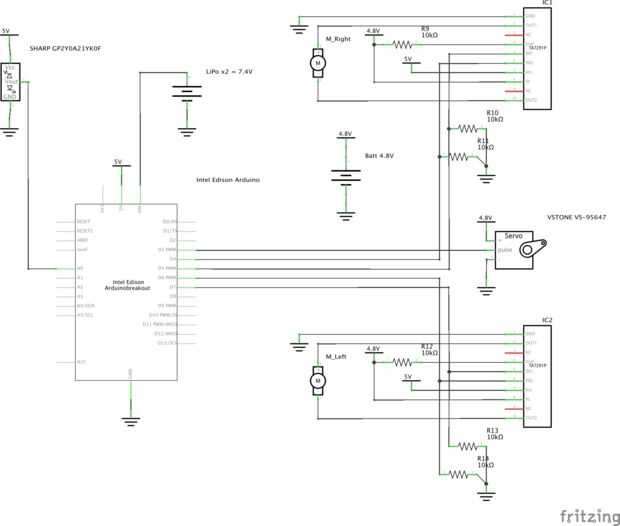
<<< Hardware >>>
El regulador del motor fue hecho en la Junta universal.
Utiliza una cubierta del yogurt y me adjunta un sensor de infrarrojos a un servo. Absorbe un choque topar...
Cableado y sujete cada tableros por separadores.
<<< Software >>>
Los programas de software Space Rover que fue escrito en Python.
1. medir la distancia a los obstáculos cada ángulo con un sensor de infrarrojos
2. el sentido más profundo de la cara y avanzar un poco
3. lazo 1
<<< Para ejecutar a Space Rover >>>
Conectarse a edison vía WLAN en "ssh" y ejecutar este programa
# ssh root
$ python spacerover.py
Tipo CTRL-C para detener
---
Perdón por mi mala Inglés. Por favor, ¡ disfruta!
")
")
")




)")


")

")
