Paso 2: El circuito
![]()
![]()
![]()
Cada velocidad del motor es controlado por un circuito individual mediante modulación de anchura de pulso. Usted podría preguntarme por qué usé PWM, y os contare que decido usar PWM porque en una etapa temprana del diseño estaba controlando los motores con resistencias variables, y no podía alcanzar el rango de velocidades que estaba saltando porque los motores dejan de funcionar en un punto temprano. Cuando se utiliza PWM puede hacer cada pulso como aparte de lo que quiera y el motor no le importaría porque se le da un impulso de energía, así que usted puede hacer que vaya tan lento como quieras. (No sé si me hago claro, si no usted puede preguntarme en un comentario.)
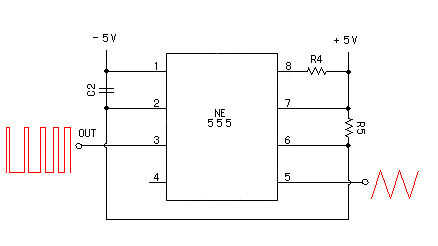
Usé un circuito temporizador simple para hacer el PWM con el famoso NE555. Pero este circuito entregar siempre el mismo pulso cada vez, y yo quería ser capaz de cambiar sus propias formas. Así que decidí alimentar el circuito de sincronización con una onda triangular que va a cambiar la configuración del PWM. Para generar esta ola usé un amplificador operacional JFET doble. Y para hacerlo aún mejor, la onda triangular para cada circuito del motor es diferente. Esto es lograr cambiando el condensador en el circuito (C1).




")



")





