Paso 4: cableado
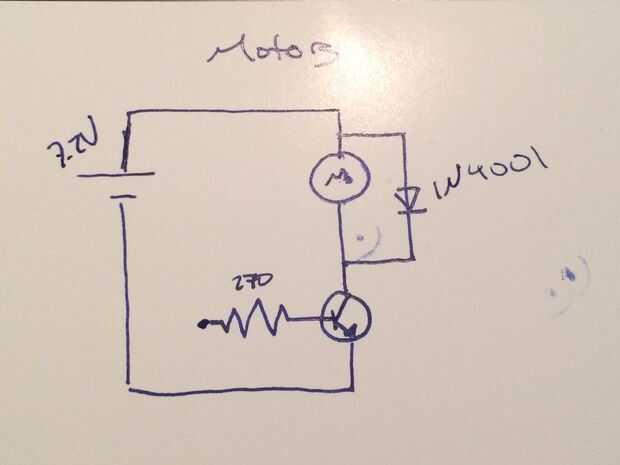
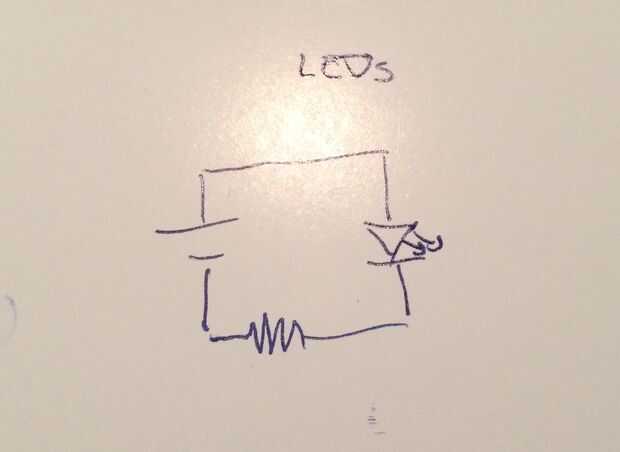
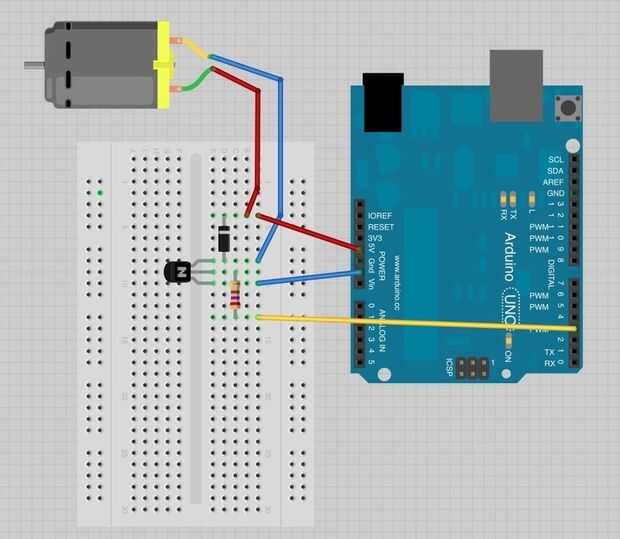
Este es el paso más complicado, ya que hay un montón de componentes y un montón de cables que salen de los componentes. Se incluyen dibujos de muestra del diagrama del circuito para los LEDs y el interruptor del motor (disculpen la mala escritura / bocetos) para dar una idea de cómo estos funcionan. La resistencia en el diagrama de motor lleva a su clavija de entrada para el Arduino. El resto de los componentes son muy sencillos para conectar y son en gran medida independiente unos de otros. Conecte el sensor de proximidad con 1 cable a la línea de tierra en el protoboard, 1 a la línea de 5V, y luego dos pins de entrada. El zumbador es simplemente utiliza que una clavija de entrada y un GND cable. Hacer dos de los circuitos de LED, 1 para el LED rojo y verde. Dos de los circuitos del motor se deben configurar, simplemente reemplace los 5V y GND conduce con los terminales positivo y negativo de la batería, (pero también Asegúrese que el cable negativo Conecte a GND, caso contrario no se disparará. El sensor de contacto es bastante fácil, simplemente conectarlo a 5V, GND y el pin 2 (pin de interrupción.) Todos los pines de entrada conectados al pin que está programado en el sketch de Arduino.
ADVERTENCIA: Los transistores utilizados en esta aplicación realmente no son adecuados para este fuerte de una batería. Los motores demasiados corrientes o cortocircuitos en el circuito debido a lo mal alojarte los puentes en la protoboard (soy culpable de ambos) te llevará a quemar el transistor y de tener que reemplazarlo. Esto obviamente no es lo ideal, y se fuma y huele muy mal. Planeo sobre el reemplazo de éstos con los MOSFETs en el futuro, pero fue limitado por el tiempo. Otra opción es usar una batería más pequeña. Nota el Arduino no puede proporcionar suficiente corriente para estos motores, por lo no es una opción.

")











