Paso 1: Paso 1: empujar cosas y rollo de cinta.

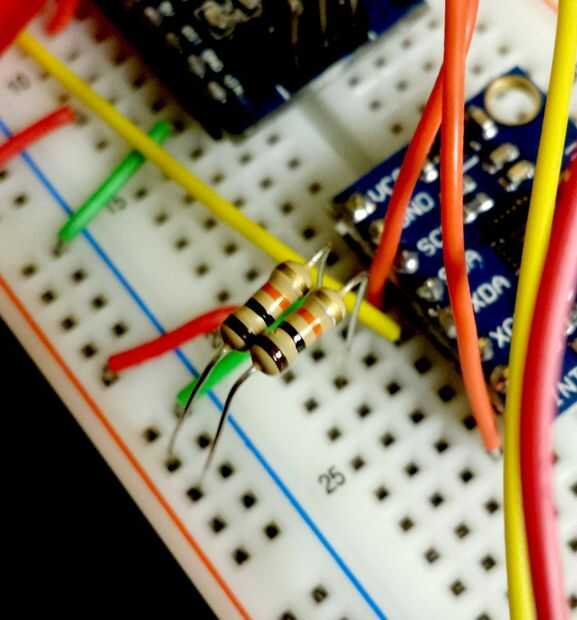
1. me llevó mucho tiempo convencerme que necesito Resistencias de pull-up de 10 k en los pines SCL y SDA de módulo del MPU-6050. Pero son vitales para el MPU funcionar correctamente. Antes de las resistencias, mi MPU provocaría bloqueo w/en un minuto de encendido. También preste atención a la #2 y #3 abajo para solución completa.
(Actualizado el 17/01/16)
2. Jeff Rowberg @ I2CDevlib.com señala en pin ADO debe conectarse a GND (I2CDevlib.com post).
3. ArsenioDev señala velocidad en baudios para MPU debe mantenerse en el máximo 115200.
4. gracias por los consejos! Los consejos anteriores habían solucionado totalmente mi lock-ups!
5. ahora estoy corriendo en un DIY Uno con ATmega32P-PU con reloj y dos tapas y se ejecuta igualmente gran! ATmega por sí sólo toma alrededor de 3ma ahora, aparte de los poderes MPU y Servo.
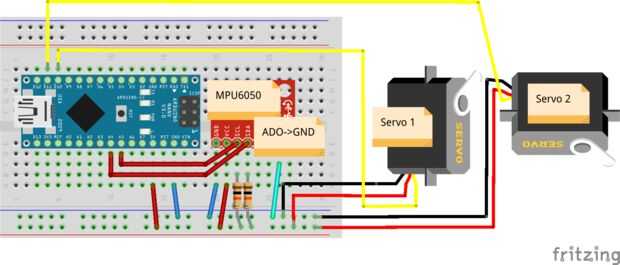
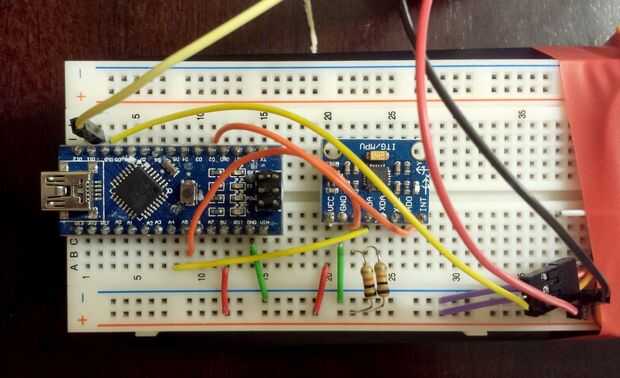
Para conexiones de cables, utilice el diagrama o fotos como referencia. (También explicado en el código)
MPU -> Arduino
VCC -> 5V (esto alimenta el carril y por lo tanto todo el sistema incluyendo los servos)
GND -> GND
SCL -> A5
SDA -> A4
INT -> D2 (tenerlo pero no utilizado en el software actual. Soy interrogación no interrumpir esta configurado)
Importante: Además de los cables anteriormente, resistencias de dos 10 k:
SCL -> resistencia de 10 K (marrón-negro-naranja-lo que sea) -> carril de 5V
SDA -> 10 K resistencia -> carril de 5V
ADO -> GND (por Jeff Rowberg @ I2CDevlib.com - ver más arriba)
SERVO 1 -> Arduino
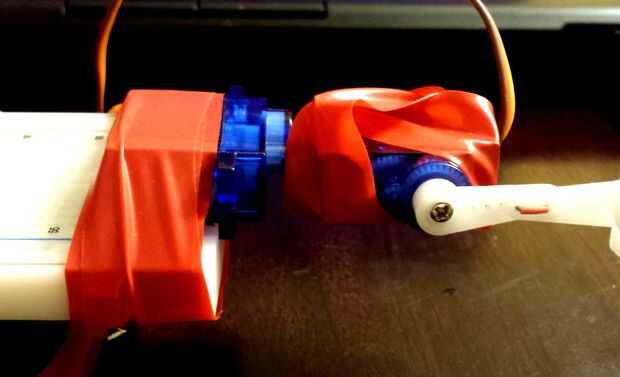
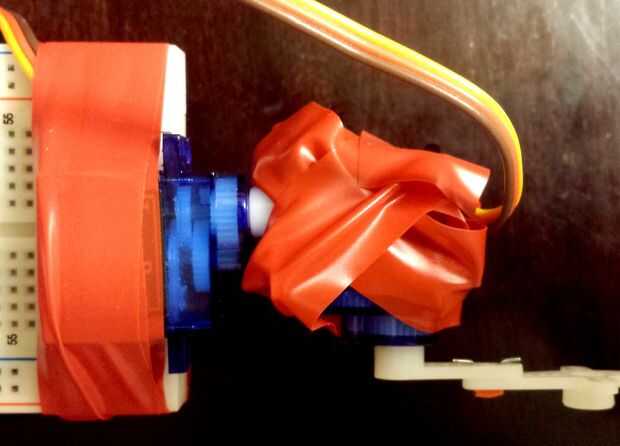
Este es el primer servo con cinta (sé que es totalmente un trabajo hack) en la protoboard, y esto está orientado para que se gire alrededor de la larga (o longitudinal o rollo) eje. Mis servos tenían los cables marrón-naranja-amarillo.
MARRÓN -> GND
NARANJA -> carril de 5V
AMARILLO -> D10
SERVO 2 -> Arduino
Este es el segundo servo que se monta en el servo 1 que controla el eje de la echada. Otra vez, está envuelto incluso peor que el primero de ellos por lo que es apenas visible en la imagen.
MARRÓN -> GND
NARANJA -> carril de 5V
AMARILLO -> D11

 FÁCIL CNC con Arduino y Servos (X, Y ejes) que muy pronto")








")


