Paso 1: Teoría: triangulación
Triangulación de características inherentes
Digitalización en 3D la mayoría se basa en la triangulación (la excepción es sistemas tiempo de vuelo "Natal" de Microsoft). Triangulación se trabaja bajo el principio básicas trigonométricas de tomar tres medidas de un triángulo y utilizarlas para recuperar las restantes medidas.
Si tomamos una foto de una pequeña bola blanca desde dos perspectivas, obtenemos dos medidas de ángulo (basadas en la posición de la bola en imágenes de la cámara). Si también sabemos que la distancia entre las dos cámaras, tenemos dos ángulos y un lado. Esto nos permite calcular la distancia a la bola blanca. Esto funciona captura de movimiento (un montón de bolas reflectantes, un montón de cámaras). Se relaciona con cómo los seres humanos ven profundidad y se utiliza en disparidad-basado en digitalización 3D (por ejemplo, de punto gris Bumblebee).
Triangulación de características proyectadas
En lugar de utilizar varios sensores de la imagen, podemos reemplazar con un puntero láser. Si conocemos el ángulo del puntero láser, es un ángulo. El otro proviene de la cámara otra vez, pero estamos buscando un punto de láser en lugar de una bola blanca. La distancia entre el láser y la cámara nos da el lado, y de esto podemos calcular la distancia hasta el punto de láser.
Pero las cámaras no se limitan a un punto en un momento, podríamos analizar una línea entera. Ésta es la base de sistemas como el escáner 3D de DAVID, que una línea laser de barrido a través de la escena.
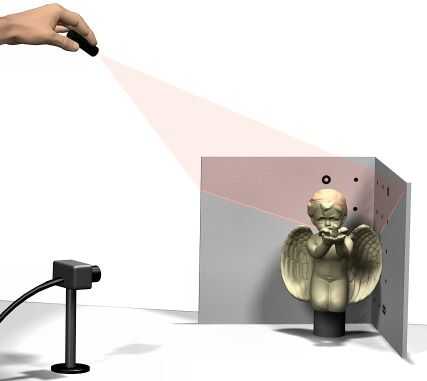
O, mejor aún, podríamos proyectar un montón de líneas y seguirlos todos al mismo tiempo. Esto se llama luz estructurada de análisis.




")








