Paso 2: soldadura
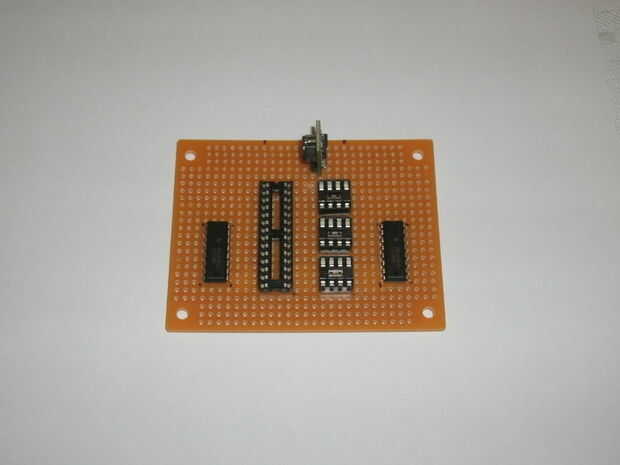
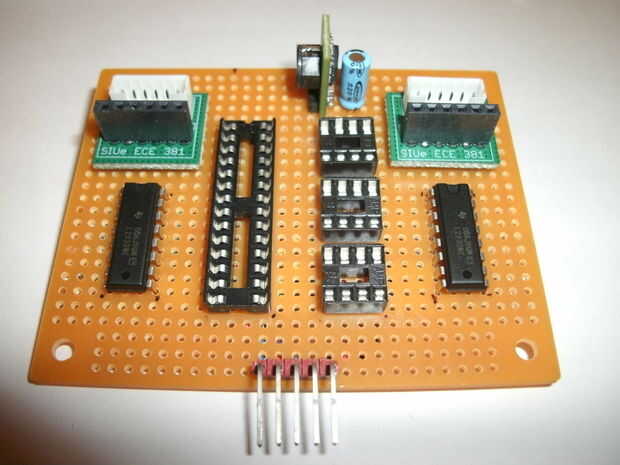
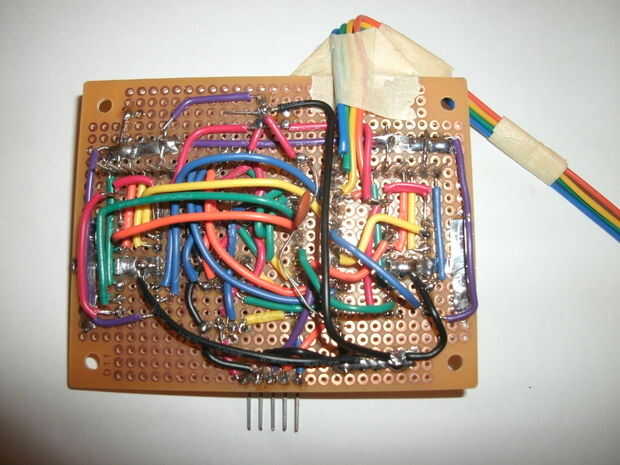

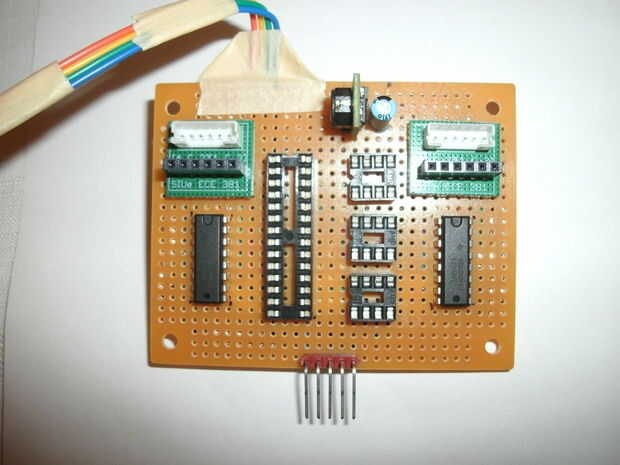
En general, se trata de cómo las cosas necesitan estar conectados:
(Tenga en cuenta que las "bobinas de paso a paso" se numeran en relación con el orden que necesitan para activarse en avanzar en una dirección a la derecha. "Tensión de paso a paso" es la tensión alta que impulsa el motor paso a paso. Esta tensión es la entrada del convertidor DC/DC. La salida de este convertidor es el "5V" enumerados. Las líneas "Común" de los motores paso a paso necesitan estar ligada a "Tensión de paso a paso". Los pernos del panel táctil se numeran de izquierda a derecha mirando el HLW4R-2C7LF conector frontal, con los contactos en la parte superior).
PSoC:
: 1 Touch panel patillas 4
: 2 Touch panel patillas 3
: 3 Touch panel patillas 2
: 4 Touch panel patillas 1
: 5 L293D (derecha) patillas 11
: 6 L293D (derecha) patillas 15
PIN 7: L293D (izquierda) pin 11
Pin 8: L293D (izquierda) pin 15
PIN 9: Sin conexión
: 10 EEPROMs todos patillas 6
: 11 EEPROMs todos patillas 5
Pin 12: EEPROM A pin 7
: 13 programación encabezado patillas 2
PIN 14: GND
: 15 programación encabezado patillas 1
Pin 16: EEPROM A pin 1
: 17 EEPROM B patillas 1
: 18 EEPROM C patillas 1
: 19 programación encabezado patillas 3
: 20 L293D (izquierda) patillas 7
: 21 L293D (izquierda) patillas 2
: 22 L293D (derecha) patillas 7
: 23 L293D (derecha) patillas 2
: 24 los EEPROMs patillas 2
: 25 EEPROM B patillas 7
: 26 EEPROM C patillas 7
PIN 27: Sin conexión
PIN 28: 5V
(Nota que hay tres EEPROMs en esta implementación. Cuando aparecen múltiples conexiones, se aplican a EEPROMs A, B y C respectivamente)
EEPROMs:
Pin 1: PSoC pin 16, PSoC pin 17, PSoC pin 18
: 2 PSoC patillas 24
PIN 3: 5V
Pin 4: GND
: 5 PSoC patillas 11
: 6 PSoC patillas 10
PIN 7: PSoC pin 12, PSoC pin 25, PSoC pin 26
Pin 8: 5V
L293D (Motor izquierdo):
Pin 1: 5V
: 2 PSoC patillas 21
PIN 3: Paso 3 de la bobina
Pin 4: GND
Pin 5: GND
PIN 6: Paso a paso 1 de la bobina
: 7 PSoC patillas 20
Pin 8: Voltaje paso a paso
PIN 9: 5V
PIN 10: Paso a paso de la bobina 4
: 11 PSoC patillas 7
Pin 12: tierra
PIN 13: GND
PIN 14: Paso a paso de la bobina 2
: 15 PSoC patillas 8
Pin 16: 5V
L293D (Motor derecho):
Pin 1: 5V
: 2 PSoC patillas 23
PIN 3: Paso 3 de la bobina
Pin 4: GND
Pin 5: GND
PIN 6: Paso a paso 1 de la bobina
: 7 PSoC patillas 22
Pin 8: Voltaje paso a paso
PIN 9: 5V
PIN 10: Paso a paso de la bobina 4
: 11 PSoC patillas 5
Pin 12: tierra
PIN 13: GND
PIN 14: Paso a paso de la bobina 2
: 15 PSoC patillas 6
Pin 16: 5V
Jefe de programación:
(Nota: la numeración utiliza es para visualizar el tablero desde arriba, de izquierda a derecha. En este orden, los pernos de MiniProg son SDA SCLK, XRES, GND, VDD)
: 1 PSoC patillas 15
: 2 PSoC patillas 13
: 3 PSoC patillas 19
Pin 4: GND
Pin 5: 5V
 imágenes en cobre")

")




 dentro de la caja (Cómo grabar y mostrar múltiples dibujos en acrílico transparente)")



")

