Paso 21: Calibración de holgura
Antes de ejecutar los bocetos de Arduino que corrigen para la reacción, es una buena idea calibrar los valores de corrección de la reacción. Los valores predeterminados de reacción están conectados en la biblioteca como 120 pasos para motores horizontales y verticales, pero se puede modificar el código para establecer la reacción a cualquier valor.
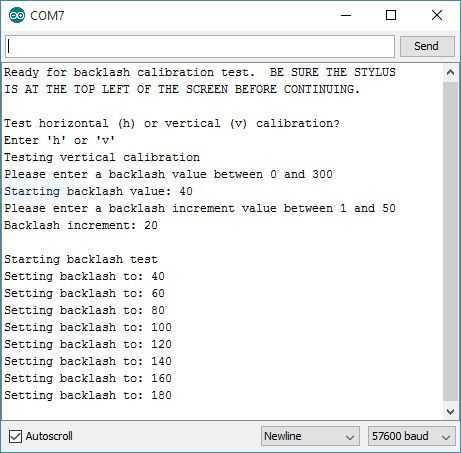
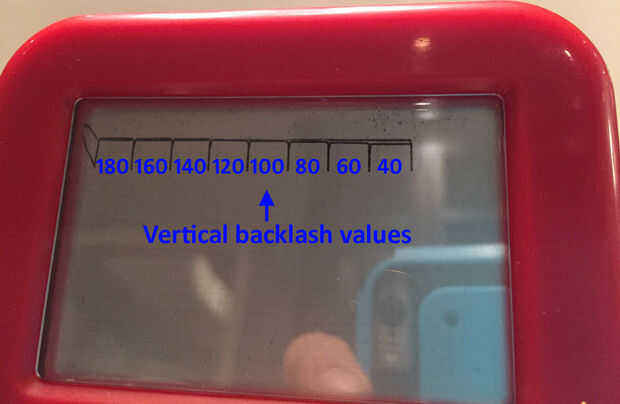
Para ejecutar la calibración de contragolpe, el bosquejo de EtchABotCalibration a Arduino y ejecutar el IDE de Arduino en modo monitor serial. Debería ver la ventana de serial de Arduino en la foto de arriba. Usted tendrá que introducir (1) si usted quiere probar la reacción horizontal o vertical, (2) un valor inicial y (3) el valor para incrementar la reacción por cada paso. El bosquejo a prueba 8 diferentes valores para el parámetro de reacción, aumentando el valor por el incremento especificado con cada paso. El EtchABot dibuja un patrón que se ve como la mostrada arriba. Donde se superponen las líneas horizontales es el mejor valor para el parámetro de reacción vertical. En este caso, un valor de 120 es la mejor opción.
Ejecute el programa dos veces – una vez para la horizontal y una vez para la calibración vertical. Los resultados de la calibración vertical se muestran en la imagen de arriba. El mejor valor de calibración de holgura es donde las líneas se superponen completamente. Esto es a menudo con un valor en algún lugar en el rango de 100 a 140, pero varían.
Si desea cambiar los valores de reacción en uno de los bocetos de Arduino, puede Agregar un par de líneas en el código de derecho una vez creado el objeto EtchABot. Busque la línea en el código que dice:
y agregue dos más líneas después de cambiar la configuración de la reacción:
Obviamente, cambiar el número 100 que usted desee la corrección de la reacción a ser. Los valores de corrección vertical y horizontal pueden ser diferentes entre sí.













