Paso 3: La unidad de regulación de anchura pulso
Unas palabras acerca de la técnica de control están en orden. Regulación de anchura de pulso es una variación de la técnica conocida como modulación de anchura de pulso y es una manera de controlar la energía girando rápidamente encendido y apagado. Prefiero el término regulación de anchura de pulso, ya que nosotros estamos realmente no modulación de los pulsos, pero más bien cambiando su duración (ciclo de trabajo) y así regular la potencia entregan a la carga. Si usted está más cómodo con el término PWM, siga adelante y llamar así.
Esto es realmente regulación de anchura de pulso, modulación de anchura de pulso no. Se regula el ancho de pulso para controlar el período de tiempo que se aplica energía. Por ejemplo, cada 10 segundos durante la salida de control es en para 3/10ths de segundo. Este sería un ciclo de trabajo 3% y el ancho del pulso sería que el mismo 3/10ths segundo cada ciclo de 10 segundos. Aumentar el tiempo de la salida esté en haciendo el pulso mayor daría vuelta la unidad siendo controlada en más tiempo. Así regulamos el ancho de pulso para controlar la carga; en nuestro caso la placa. Girando la placa enciende y apaga en una relativamente rápida, pero constante ritmo, moda, controlar estrechamente la temperatura.
Modulación de anchura de pulso, por el contrario, varía el ancho del pulso de cada ciclo. Haciendo esto, y el tren de pulsos resultante de la filtración, se pueden producir formas de onda complejas. Esto es verdadero PWM y no es realmente lo que estamos haciendo aquí. Regulación de anchura de pulso es suficiente para nuestras necesidades. Usted puede aprender más sobre PWM aquí.
Como se dijo, la unidad de regulación de anchura de pulso es controlada por un microcontrolador Atmel AVR ATtiny2313 y dos expansores de puertos I2C. Seguir adelante y descargar el esquema y el código fuente para el controlador ahora. El código fuente para el programa de control es un archivo Zip que se descomprima en su propio directorio llamado Control. Utilizar el sistema de desarrollo de Ghetto para programar el microcontrolador. No es necesario, pero puede que desee echar un vistazo a este Instructable para aprender más sobre el bus I2C. El I2C Instructable le mostrará cómo modificar su sistema de desarrollo de la Ghetto para que usted puede utilizar el Bus I2C en él.
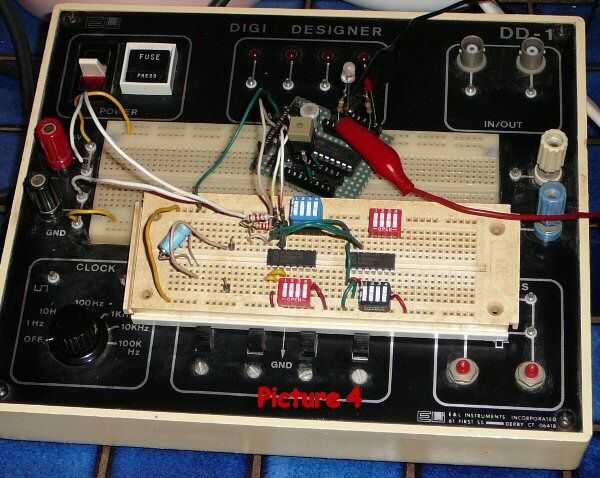
Utilice las piezas que ordenó en el paso 1 y el esquema que has descargado. Cuadro 4 muestra cómo construir a la unidad de regulación de anchura de pulso. Mi sistema de desarrollo de la Ghetto se muestra (construido en tablero de perf) junto con la expansión del puerto y los interruptores DIP (construido en protoboard sin soldadura). El cuadro más grande de DigiDesigner sólo se utiliza como una fuente de alimentación de 5V. La construí de esta manera ya que uso los sistemas de desarrollo del Ghetto para las porciones de otros experimentos. Puede utilizar el mismo enfoque o construir un sistema - su elección. En cualquier caso, el esquema y el software son los mismos.
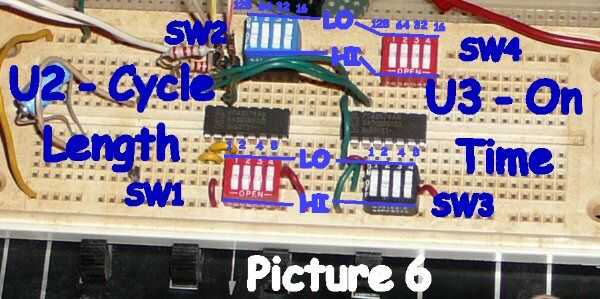
Tenga en cuenta que los DIP switches como se muestra en el esquema indicar los pines de puerto de expansión para conectar los switches a. La orientación de los interruptores debe ser como se muestra en el cuadro 6. SW1A y SW1B en el esquema es realmente un paquete de cuatro interruptores DIP - SW1. Mismo para SW2, 3 y 4. Conectar como se muestra en la fotografía para pernos de U2, pero ignorar los números SW1A, etc. que aparecen en el esquema. Apenas enchufe les por lo que conectan directamente a U2 y U3 en los pines adecuados, con el otro lado de los paquetes de conmutador conectado a tierra. Cuadro 6 muestra más detalle.
Para programar el ATtiny2313, iniciar el entorno de WinAVR, cambie al directorio con los archivos descomprimidos en él y usar el Makefile para compilar el software y programa de su parte. El programa es bastante sencillo. Temporizador/contador 1 se utiliza en modo Fast PWM para producir los pulsos utilizados para el control de la unidad de Control AC. Los pulsos aparecen en PB4 y PD6 se utiliza para flash LED 1. El reloj de 1MHz por defecto del ATtiny2313 se utiliza y se divide por 1024. Para que la resolución del PWM es de.001024 segundos. Puesto que vamos a utilizar los pasos de una décima de segundo, multiplicamos a los ajustes del interruptor DIP por 98 que pasos de rendimientos de 0,1003 segundos - lo suficientemente cerca.
Una vez que ha construido a la unidad de regulación de anchura de pulso, querrá probarlo. Energía conectando una fuente de alimentación de 5 voltios. Si has trabajado por delante y construido la unidad de Control de potencia de CA no se conectan todavía. Cuando conecta la alimentación de 5V, LED1 debería parpadear lentamente dos veces para hacerle saber que está listo para ir. Los DIP-switches conectados a U2 expansor de puerto se utilizan para controlar la longitud de ciclo, mientras que los DIP switches conectados a U3 de expansor de puerto se utilizan para controlar el ciclo de trabajo o en el momento del ciclo. Ambos controles se encuentran en unidades de 1/10 de segundo y utilizan código binario. No te asustes si no estás familiarizado con código binario, voy a explicarlo.
Código binario es mejor considerado como un código de duplicación. Es decir, el valor numérico asignado al primer interruptor es 1 y los siguientes interruptores tienen valores numéricos que doble. Para que el segundo conmutador tiene un valor de 2, valor de la tercera es 4, luego 8 y así sucesivamente. El valor de la serie de conmutadores acoplados a U2 o U3 es la suma de los valores numéricos de todos los interruptores que están encendidos.
Aquí está una tabla que muestra los valores de los interruptores individuales en SW1 y SW2 conectados a U2 para fijar la duración del ciclo. Esto supone que han construido circuito de la misma que la mía y los interruptores DIP han orientado la misma manera como se muestra en el cuadro 6.




 - con BriteBits")








