Paso 4: Sensores de posición de caña
A fin de eyeRobot para que coincida con su velocidad para que el usuario, el eyeRobot detecta si el usuario está empujando o retardando su movimiento hacia adelante. Esto se consigue deslizando la base de la caña a lo largo de una pista, como un potenciómetro detecta la posición de la caña. El eyeRobot utiliza esta entrada para regular la velocidad del robot. La idea de la eyeRobot adaptación a la velocidad del usuario a través de un sensor lineal fue inspirada realmente por la cortadora de césped familiar.
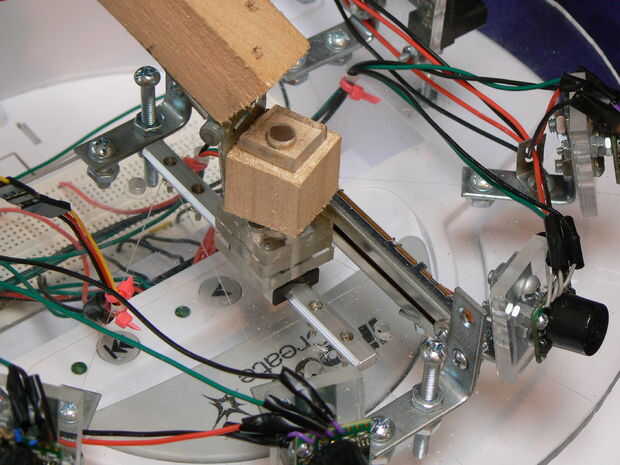
La base de la caña está conectada a un bloque de guía moviéndose a lo largo de un carril. Al bloque de guía, es un potenciómetro deslizante que lee la posición del bloque de guía e informa al procesador. Con el fin de permitir que la palanca para girar en relación con el robot hay una vara, corriendo a través de un bloque de madera, formando un cojinete giratorio. Este cojinete se conecta luego a una bisagra para permitir que la palanca para ajustar a la altura del usuario.











 /w Arduino")

