Paso 3: Receptor y transmisor
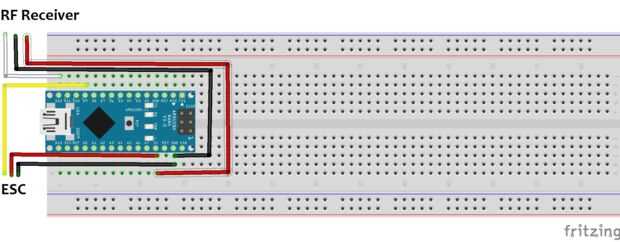
Si usted no conecta su ESC para motor cheque este instructable y hacer todo lo que escribió. Si lo has hecho vamos a hacer sobre el circuito del receptor. Para estancias de conexión batería, el ESC y el motor al igual que en el instructivo que he le enlace. Circuito de Arduino es un poco diferente. No hay ningún potenciómetro, pero existe el Receiver(as on first image) RF. REMBER: si Arduino está conectado vía usb no conectar VIN pin en Arduino al pin rojo de ESC.
Ahora tenemos que programarlo. Y hay un problema. Porque para controlar el receptor utilizamos VirtualWire biblioteca y control ESC utilizamos biblioteca de Servo, y ambas de estas bibliotecas utilizan el mismo temporizador así que si voy a intentar compilar usando estas dos bibliotecas Arduino devolverá error. Pero ojala exista una solución para este problema. Hay un reemplazo de la biblioteca estándar de Servo y se llama ServoTimer2 biblioteca. No devuelve error. En esta biblioteca escritura función es igual a writeMicroseconds de Servo library. Este es el único cambio. Así que descargar motor_receiver y ServoTimer2 biblioteca y enviar código motor_receiver a Arduino. Establece el mínimo y el más alto en sus valores de umbral y enviar el código para el Arduino.
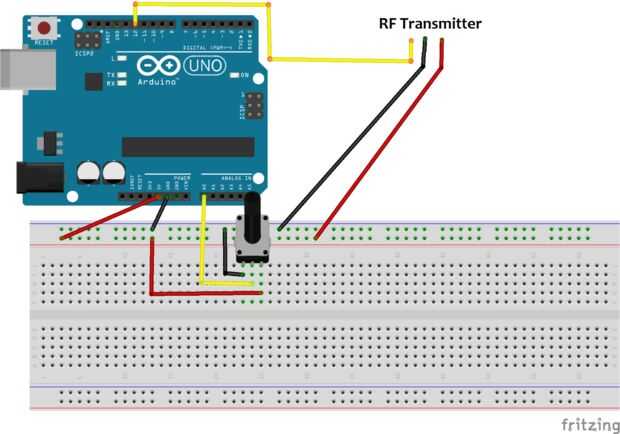
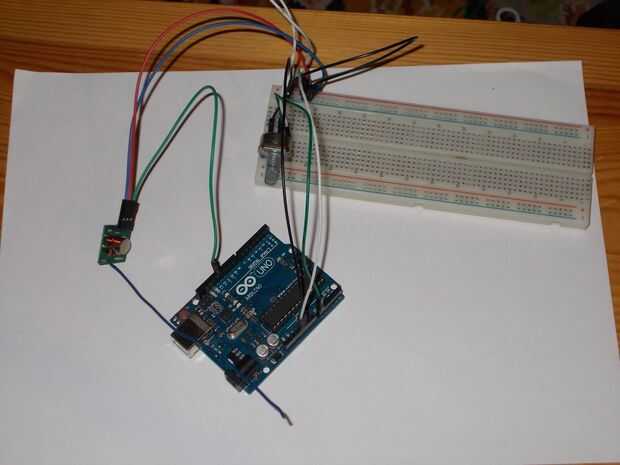
Vamos a conectar el transmisor. Para Arduino Conecte el transmisor de RF y el potenciómetro (imagen 2 y 3). Descargar motor_transmitter, situado más bajo y más alto como en el receptor y enviar el código para el Arduino. En Serial Monitor para el receptor y los datos que recibe. Gire el potenciómetro y comprobar si de cambio de datos correctamente. Si es así, comentar las líneas con serie y descomentar la línea con myESC.write (lo he escrito en el código). Ahora desconecte su receptor de computadora y conecte el cable rojo del ESC a VIN.





")







