Paso 4: Configuración del sistema de Control
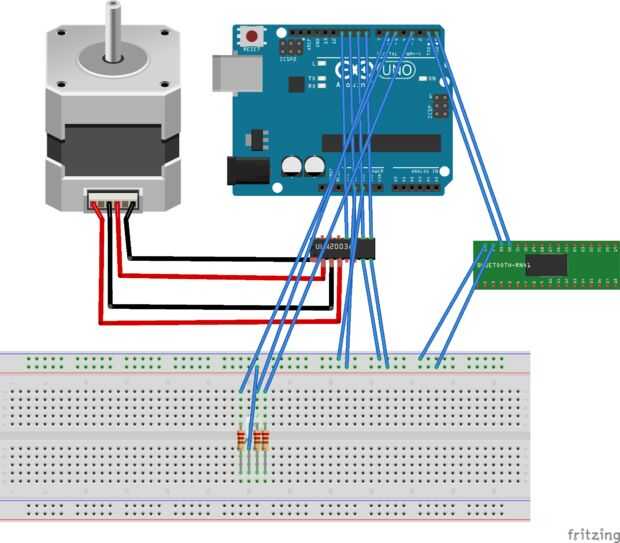
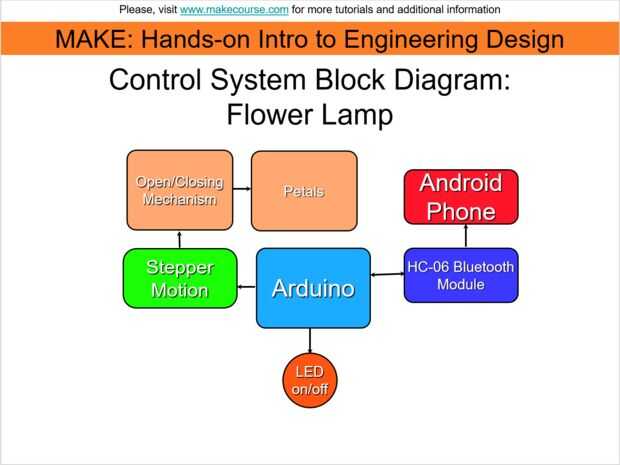
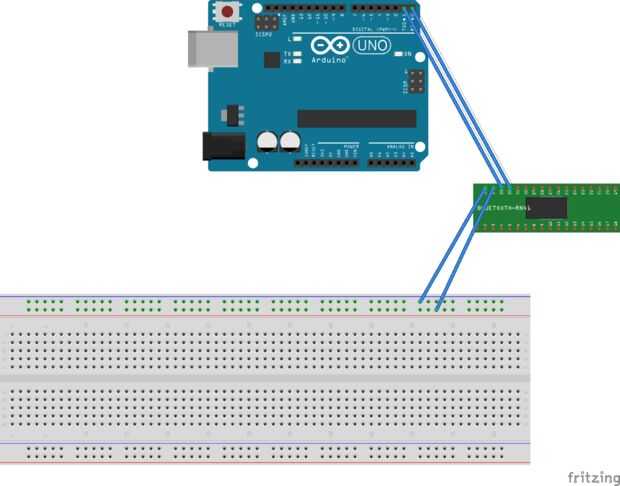
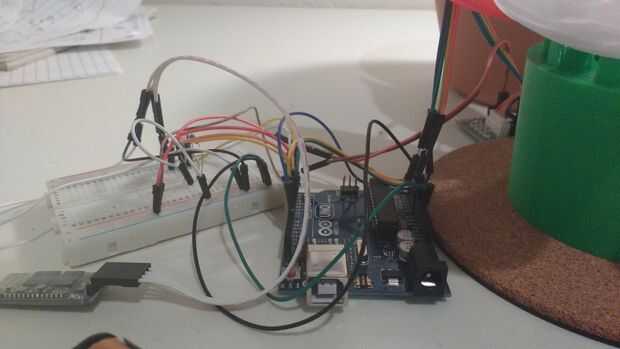
Hardware puede parecer desalentador en las fotos con todos los cables y componentes transversales. Para ayudar, he configurado un diagrama Fritizing para este sistema de control. Hay tres partes separadas que se instalan juntos en este proyecto: el motor paso a paso y controlador, el módulo de Bluetooth HC-06 y el LED RGB. He incluido fotos de estos tres configurar individualmente, así una completa imagen de ellos juntos. Seguir los diagramas de Fritizing uno por uno hasta que coincide con la primera foto.
Instrucciones detalladas:
Configuración de los carriles de la energía:
Hay sólo una entrada de 5V de Arduino Uno y vas a necesitar tres. Para solucionarlo, te Armamos un tren de potencia en los extremos de la placa. 5V se ejecutará a través de la columna roja marcada "+" y la tierra se ejecutará a través de la columna azul marcada "-". Para empezar, conecte un cable de puente desde la entrada de 5V de Arduino a la + tren de la protoboard. Luego conecte otro cable de puente desde la entrada GND de Arduino para el - carril de la placa.
Utilizaremos estos dos carriles con el resto de nuestros componentes.
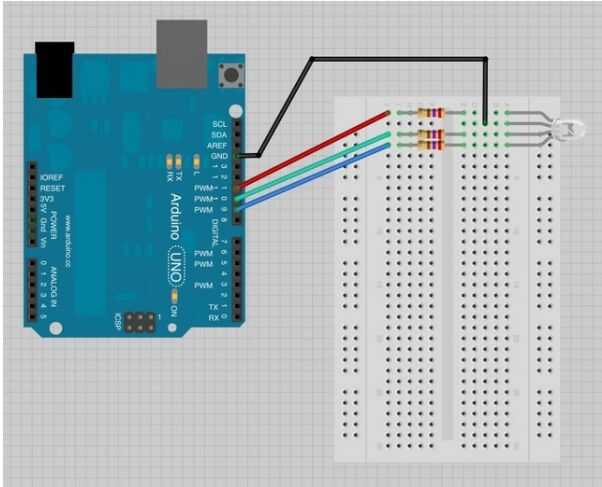
Puesta en funcionamiento el LED RGB:
Revisa el segundo diagrama de Fritzing con el LED. Vas a necesitar tres resistencias de 220 ohmios y tres cables de puente. Los cables son de colores en el diagrama para cada color del RGB. Aquí es dónde se deben colocar los otros extremos de los cables de puente:
PIN 3 >> cable rojo
PIN 4 >> verde alambre
PIN 5 >> azul cable
+ >> o de cátodo común - >> ánodo común (dependiendo de que LED tienes)
Recuerde que los carriles de la energía viajan verticalmente de arriba a abajo. Conectar el cátodo/ánodo común en cualquier lugar en el carril de alimentación abajo donde se configura en la parte 1.
Configurar el módulo Bluetooth:
Hay cuatro patas en el módulo de bluetooth (HC-05 o 06 de HC). Conecta a 4 cables del puente y la puesta en marcha es el siguiente:
PIN - 0 >> RX
PIN 1 >> TX
+ >> VCC
->> Tierra
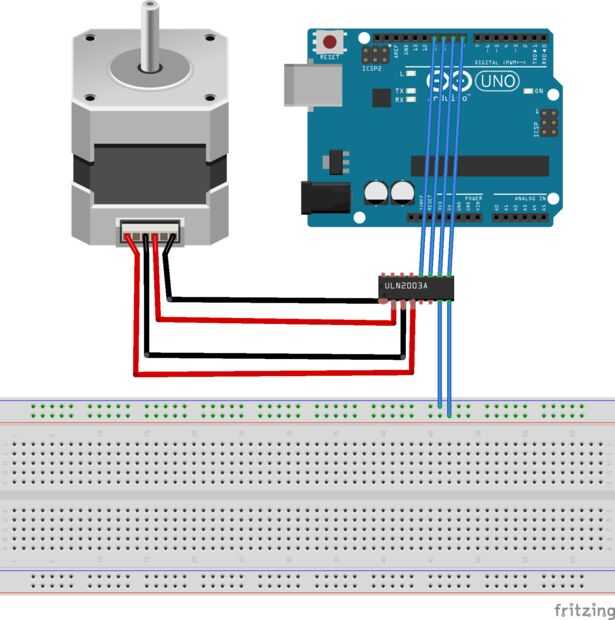
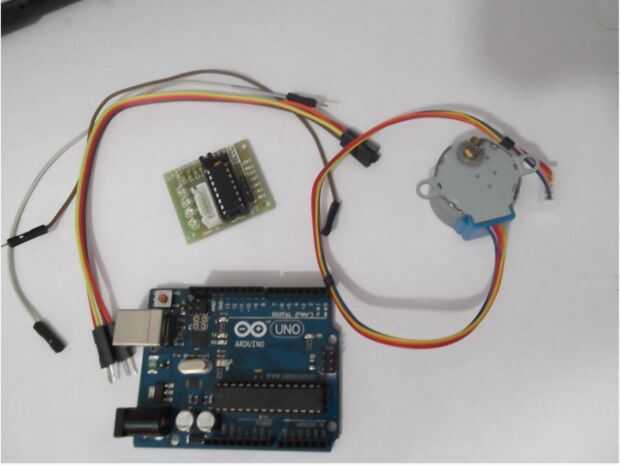
Puesta en funcionamiento del Motor paso a paso:
El Motor de pasos de BJY48 viene con un sistema de puente de alambre conectado a un puerto. Inserte el conductor del motor. El que estoy usando es el ULN2003. Tiene cuatro pines de entrada IN1-IN4. Utiliza 4 cables de puente para conectar a los pines 8-11 en la placa Arduino. Además, la Junta también tiene dos patas consideradas + y -. Conecte + a la energía positiva del carril en el protoboard y conectarse - el carril de la energía negativa en el protoboard.











")

