


Movimiento de las piernas inmóviles
Transformación de rotación
Caminando Demo
La interfaz de usuario
Éste es un código abierto mini mamíferos cuadrúpedos robot o usted lo puede pensar como un robot perro de cuatro patas. El objetivo de este proyecto es dar a las personas la capacidad de crear y estudiar 4 robots cuadrúpedos mamífero de patas como la Boston Dynamics LS3 o el MIT Cheetah en menor escala. Además, me encanta los perros y siempre quise hacer un robot perro como compañero.
Todas las piezas del robot pueden ser fácilmente 3D impreso en una impresora 3D de bajo tales el M3D(esto es lo que uso para la fabricación de las piezas). Si no tienes una impresora 3D pueden enviarlas a imprimir en línea en el sitio como Shapeways.com o acceder a una tienda de tecnología que tenía una impresora 3D.
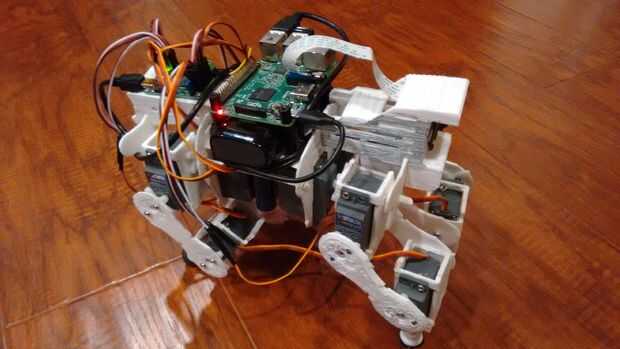
Para este proyecto, trato de lograr la siguiente meta:
- Fácil de construir.
- Bajo costo.
- Control inalámbrico.
- Algún tipo de funcionalidad de movimiento.
Como un proyecto abierto, voy a hacer públicos todos los archivos de cad, así como el software. Además, 4 robots cuadrúpedos de mamífero legged recientemente popularizado por Boston Dynamics por lo que la falta de un código fuente abierto. Debido a esto, animo chico en mi trabajo y crear su propio algoritmo de movimiento. Yo también trabajo en el software de este proyecto y hacer nuevas mejoras de diseño que de vez en cuando. Espero que también puede hacer su propio Fenrir después de esta instrucción de lectura. :)




 -")

 Software (GIMP)")





