







Este bot fue construido para funcionar en pleno y otros espacios reducidos.
Construí a este pequeño individuo hace dos años para ejecutar Cat5/6 y cable coaxial a través de espacios de pleno (espacios abiertos encima de techos y pisos). Largo de los años ha visto un poco de acción y ha sido un activo en cualquier pequeño espacio que requiere una ojeada o un claro enfoque práctico.
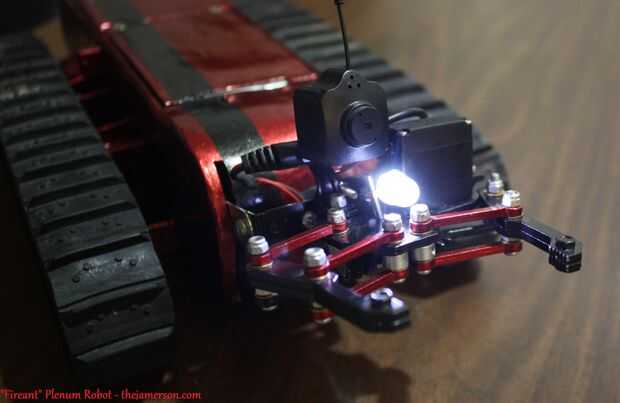
Características del Robot de FireANT pleno:
- Cámara de vídeo de 2,4 Ghz color
- Transceptor de 2.4GHz
- Brazo de giro e inclinación con garra unida
- Linterna LED ultra
- Zumbador para la ubicación del usuario a través de superficies
- Las pisadas de tanque de goma para una tracción mejorada
- Construido de fibra de vidrio resistente, resistente a daños
- Estuche a prueba de golpes
Se trata de un PC de IBM y un dispositivo serial compatible con Mac/Linux.
Para hacer funcionar el Robot de pleno Fireant, todo lo que necesitas es un ordenador que puede aceptar un transmisor-receptor del USBy un programa que puede hablar con dispositivos serie a 9600 baudios. Estos programas básicos incluyen masilla o si quieres ser más creativo, que puede utilizar un programa de estratificación como proceso para automatizar comandos.
Remoto uso controlado o automatizado.
El Robot de pleno Fireant tiene en su corazón un Arduino Uno R3 con un Escudo del Motor de Adafruit. Esta combinación puede ser utilizada con el bosquejo de la predeterminada, que permite a un controlador mediante Prensas de teclado reasignado para operar la construcción de dispositivos, o predeterminado de otro sketch que se codifica para realizar otra tarea.
Sé que esto no es un Instructable paso por paso pero he vinculado la mayoría de las partes en el texto anterior. No dude en utilizar el código adjunto en proyectos sin fines de lucro, siempre y cuando se le da crédito.













