Paso 4: electrónica
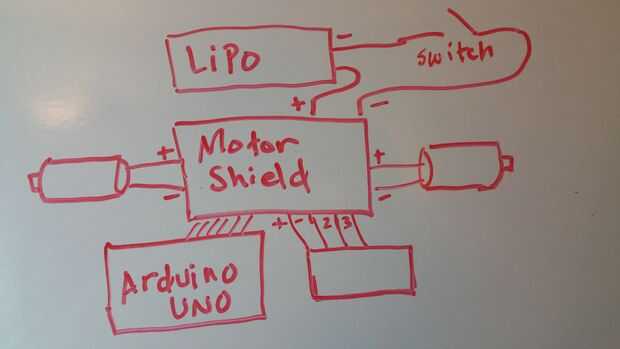
Esto es probablemente la parte más sencilla de la estructura. Bluetooth controlado por Arduino robots son bastante comunes. En esencia, sólo hay 6 partes simplemente conectadas. Hay un escudo de Adafruit motor que se encuentra en la cima de un Arduino UNO. Al escudo está engranado C.C. dos motores, un tablero de BlueSMiRF Bluetooth y una LiPo. El escudo está configurado (a través de un puente de conexión) para alimentación de tableros y los motores de la LiPo solo. Un pequeño interruptor se pone entre la LiPo y la Junta para que el bot puede fácilmente activar y desactivar. Y eso es todo. Personalmente, creo que esto es exactamente por qué es tan popular la plataforma Arduino. Simplifica el complejo.
BlueSMiRF TX y RX se conectan Arduino no en RX y TX de la Junta sino a los pines 2 y 3. SoftwareSerial permite leer los valores. Esto hace posible cambiar y cargar el código de Arduino sin tener que tirar los cables de los pines RX y TX.









")



