Paso 4: Preparando el circuito

Naturalmente, siempre puede fijar el circuito diferente que hacer si usted tiene sus propios componentes o prefiere soldar cosas juntos.
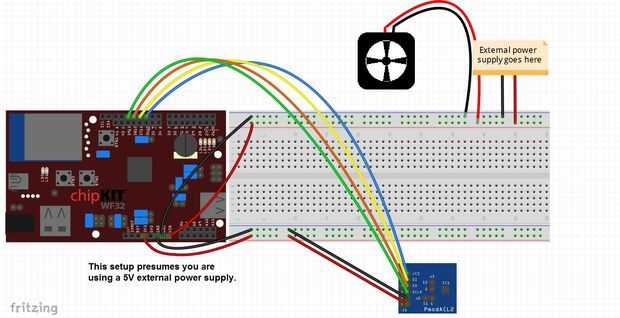
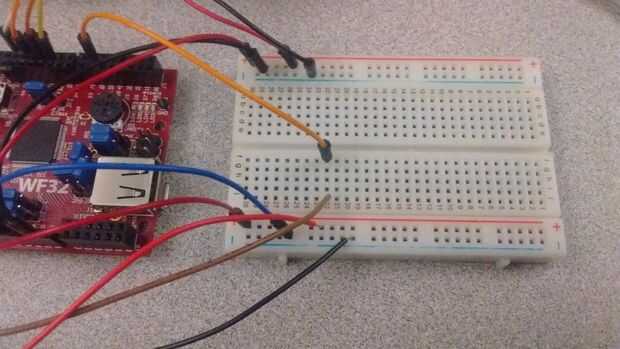
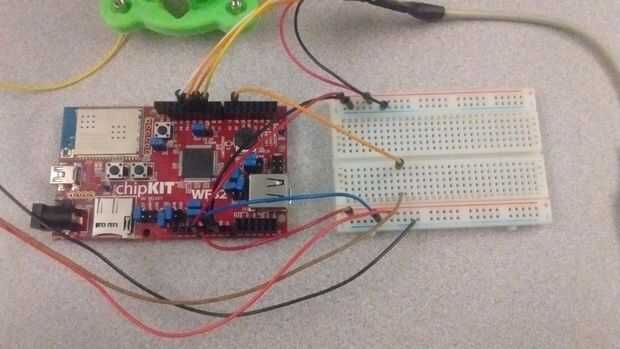
En este paso, tengo unas fotos de referencia, detallando las diferentes conexiones que hice. Pero para comunicarse en pocas palabras de lo que hacía en mi protoboard, potencia los dos lados de la placa con voltajes diferentes: un lado usé los 3.3V línea de la WF32 y el otro recibió la línea de 5V de la WF32.
Entonces cableado del ventilador PWM con el cable rojo conectado al riel de 5V, el cable negro con un carril de tierra y el marrón cable conectado al pin 6 en el WF32 para recibir la señal PWM que puede controlarse la velocidad del ventilador. El cable amarillo del ventilador es el tacómetro que no necesito para este proyecto por lo que queda desconectada.
El PmodACL2 se comunica través de SPI, por lo que a conexión de pines 1-4 (CS, SI (también conocido como MOSI), modo (también conocido como MISO), y SCLK para pines 10, 11, 12 y 13, respectivamente, en el WF32. Pin 5 en el PmodACL2 debe conectarse a tierra y el pin 6, conectado a los 3, 3V carril en el protoboard. El resto de los pines (7-12 en la fila inferior de la cabecera) no es necesario estar conectado a cualquier cosa para este proyecto.
Usar una alimentación externa de suministro con este proyecto a través de ya sea el conector de barril de los pines WF32 o VIN y GND en el cabezal de alimentación (J3) para asegurar que el sistema tiene suficiente corriente para operar (plus, yo no estoy atado a una computadora portátil). Para ello puse J15 en la posición de puente EXT y organizar los puentes de J16 que VU conectarse 5V0 si estoy utilizando una alimentación externa de 5V de la fuente o tienen los puentes configurado para que VU está conectado a LDO y LDO a está conectado con 5V0 si estoy usando una fuente externa que está clasificada entre 7V y 15V.













