Paso 3: Creando el controlador

En este punto tuve un motor paso a paso que yo quería para el control y una entrada (micrófono) que se desencadene el evento. He pensado a través del proceso y decidió que quería incluir:
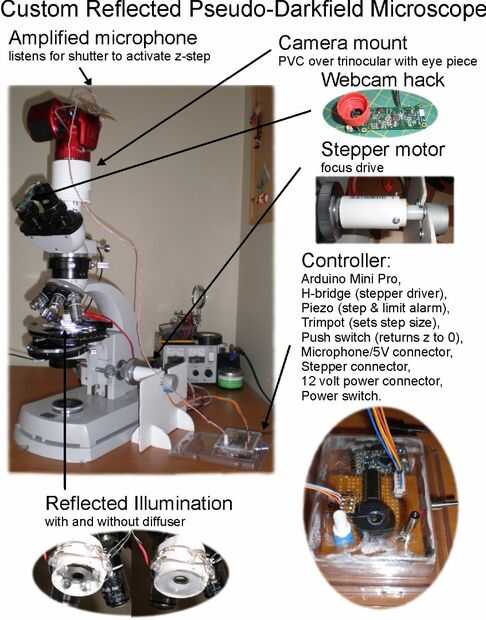
Una entrada para ajustar el tamaño de paso (mediante un potenciómetro),
Una entrada para devolver el foco a la cero (interruptor de botón),
Una salida (alarma) a un paso de la señal y hacia fuera-de-gama * (piezoeléctrico),
Una vez que tuve todas las piezas, montado el circuito en un Arduino Starter Kit (un juego maravilloso para aprender programación de Arduino). El motor paso a paso fue impulsado por un doble H puente de Adafruit (L293D, para esquema de ver https://learn.adafruit.com/adafruit-arduino-lesson-16-stepper-motors). Una vez que el circuito montado, recurrí a la programación. Básicamente, tomé el bosquejo de nivel de sonido de amplificador de micrófono de Adafruit y modificado para saber donde se encuentra, el paso a paso configurar el tamaño de paso midiendo una entrada y luego escuchar una señal lo bastante fuerte. Oyendo la señal, el controlador de vueltas el motor y da un pitido (como el paso a paso no se le fuera de rango, si así el dispositivo solo le dará el rango de alarma). A través de la fase de prueba, he encontrado que necesito usar 12V para obtener suficiente par que girar la perilla de enfoque de mi microscopio. Una vez que todo funciona correctamente todo lo puse en un circuito, había conectado a un Arduino Mini Pro y colocado en un caso (en realidad es el embalaje para el FDTI que necesitaba programar el Arduino Mini Pro). Imagen final muestra el sistema completo, incluyendo la fuente de iluminación usada para la proyección de imagen reflexiva pseudo-campo oscuro.
.
* Mi microscopio tiene un rango limitado en el foco fino (20 vueltas o 2mm); No quiero que el sistema de tensión de la perilla de enfoque o paso a paso motor. Por lo tanto, he diseñado el sistema para trabajar dentro del rango de enfoque fino (< 10.000 pasos, recuerde que este paso a paso tiene 32 pasos/vuelta y engranaje de 1/16). También quería que el foco al cambiar en una dirección, siempre contra la gravedad, por lo que la proyección de imagen comienza en la parte inferior (0), va hasta el límite se alcanza y se vuelve a 0 cuando el pulsador es activado.




")


 por menos de $10")





