Paso 11: conclusión

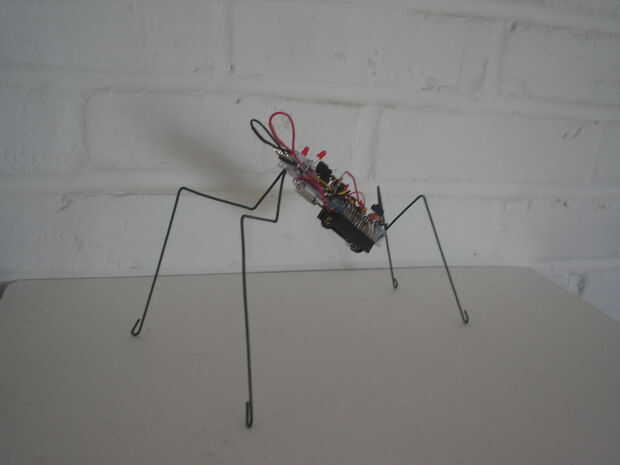
El proyecto fue un éxito en términos de hardware y apariencia, es una función de "Freeform" Arduino.
Pero en términos de funcionamiento, no!
Como mencioné en el paso 8, los brazos y las piernas son demasiado grandes! (Cable de calibre 16). Es demasiado duro para el pequeño motor vibrador manejar.
Y voy a tener una nueva versión, los cables más pequeños como brazos y piernas, motores más grandes.
Aquí hay un video.
Video





")


 de forma libre")




